中國首個“星際礦工”誕生 太空資源開發(fā)邁出關(guān)鍵一步
隨著地球資源的日益枯竭,,人類開始將目光投向太空,,尤其是月球、火星和近地小行星等蘊(yùn)藏豐富礦產(chǎn)資源的地方,。太空采礦這一以往只在科幻小說和電影中出現(xiàn)的場景正在逐步變?yōu)楝F(xiàn)實,。
中國礦業(yè)大學(xué)劉新華教授團(tuán)隊研發(fā)出國內(nèi)首臺多功能太空采礦機(jī)器人。這款機(jī)器人不同于當(dāng)下流行的人形機(jī)器人或機(jī)器狗,,其基本形態(tài)為六足模式,,包括三個輪足和三個爪足。這樣的設(shè)計主要是為了適應(yīng)太空中的微重力環(huán)境,。太空采礦機(jī)器人需要在地外星體上完成地質(zhì)勘探和礦物采集任務(wù),,鉆探是必備技能。然而,,在低重力環(huán)境下,,如何讓鉆頭順利鉆進(jìn)星體表面成為一大難題。為此,,科研團(tuán)隊模擬昆蟲的爪刺結(jié)構(gòu),,為機(jī)器人設(shè)計了特殊的爪刺足,以增強(qiáng)其附著和抓地能力,。目前,,該機(jī)器人原型機(jī)已申請專利并通過初審。
為了讓太空采礦機(jī)器人練就“十八般武藝”,,劉新華教授團(tuán)隊搭建了一個特殊的訓(xùn)練場,,主要模擬近地小行星表面的風(fēng)化程度和微重力環(huán)境。經(jīng)過不斷訓(xùn)練,,機(jī)器人已經(jīng)可以根據(jù)工作環(huán)境調(diào)整自身結(jié)構(gòu)形狀,,適應(yīng)復(fù)雜地表。此外,,該機(jī)器人還需要在中國礦業(yè)大學(xué)深地工程智能建造與健康運(yùn)維全國重點實驗室進(jìn)行進(jìn)一步訓(xùn)練,,這里可以精準(zhǔn)模擬月球表面極端環(huán)境,包括六分之一G重力場,、超高真空環(huán)境以及巨大的晝夜溫差,。通過這些實驗,科研人員能夠更準(zhǔn)確地掌握月球地層特性,,為未來實際開采做好準(zhǔn)備,。
開發(fā)太空資源不僅關(guān)乎科技競爭,更是未來人類文明可持續(xù)發(fā)展的希望所在?;诂F(xiàn)有空間科學(xué)技術(shù),、航空航天技術(shù)和采礦技術(shù),,人類有望在未來幾十年內(nèi)實現(xiàn)試驗性開采近地星體上的太空資源,。月球作為距離地球最近且資源豐富的天體,已成為全球科研投入的重點對象,。除了月球,,太陽系中數(shù)量眾多的小行星也蘊(yùn)藏著豐富的礦產(chǎn)資源,其中近地小行星因距離地球較近而具有較高的開采價值,。目前,,全球科技界已在地外天體鉆孔技術(shù)、太空中原位資源利用等多個關(guān)鍵技術(shù)上取得大量成果,。太空3D打印等新興技術(shù)的發(fā)展,,使人們對于在太空制造組裝采礦裝備及利用太空資源充滿期待。

重慶回應(yīng)大量礦泉水倒入長江 祈福行為不被提倡

火箭落后雷霆16個勝場 創(chuàng)歷史最大勝場差紀(jì)錄

本賽季庫里罰球命中率93.3% 穩(wěn)居榜首

伊朗與美國首輪間接談判結(jié)束 會談將在下周繼續(xù)進(jìn)行

陳雨菲分享和樊振東互關(guān)經(jīng)歷 從內(nèi)向到互動

離開中國后,,“甲亢哥”:想念“鹵鵝哥” 會帶他去美國 真摯友情跨越國界
歐洲芯片廠齊聲警告加稅風(fēng)暴 恐雪上加霜

辟謠美國建廠,!百余股火速回應(yīng)穩(wěn)信心:關(guān)稅影響有限 澄清聲明穩(wěn)定市場情緒

美國進(jìn)口訂單出現(xiàn)崩潰跡象 關(guān)稅沖擊波引發(fā)預(yù)訂凍結(jié)
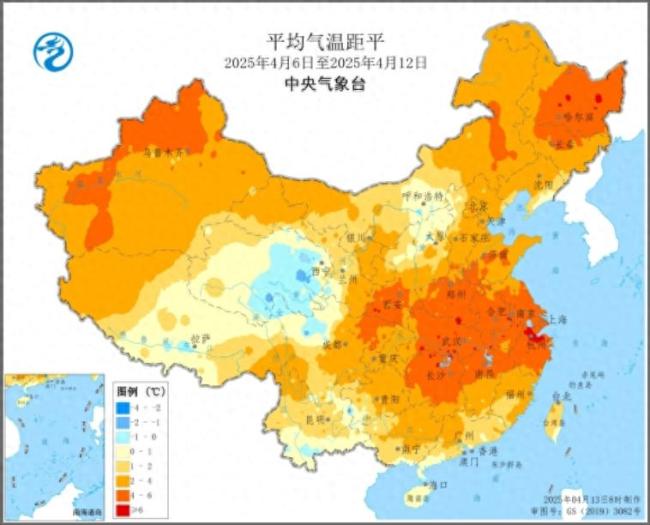
未來十天江南華南將有明顯降雨過程 利于農(nóng)業(yè)生產(chǎn)用水補(bǔ)充

女子替去世男友還債60萬,還照顧前男友家庭,,當(dāng)事人:不能讓他背負(fù)失信罵名離開 9年堅守情義無價

熱搜第一,!人民幣,大消息 跨境使用顯著增長

楊冪劉詩詩時隔16年再合作 詩冪同框引熱議
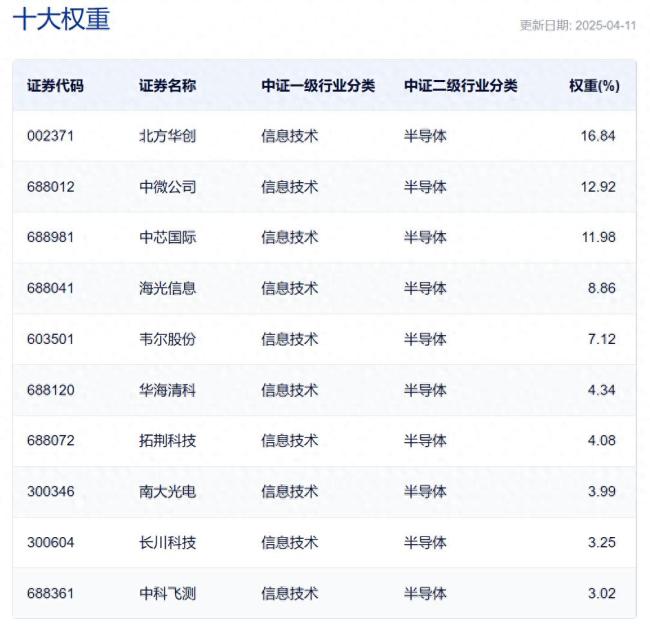
國產(chǎn)半導(dǎo)體設(shè)備“攻守之勢異也” 政策利好推動產(chǎn)業(yè)發(fā)展

俄羅斯最新涉華表態(tài) 中俄石油合作前景廣闊

反制美“對等關(guān)稅”最好辦法是什么 堅定推進(jìn)高水平開放

何運(yùn)晨領(lǐng)悟“理想offer”,,職場新進(jìn)階
榮昌鹵鵝爆火后遭遇李鬼 正品與仿冒之爭

媒體:歐洲版“星鏈”前路漫漫 自主之路挑戰(zhàn)重重

美國高管一家5口墜機(jī)遇難 美直升機(jī)無記錄儀 事故調(diào)查面臨挑戰(zhàn)

美伊首輪間接談判結(jié)束 建設(shè)性對話繼續(xù)

巴西一女排運(yùn)動員懷孕5個月仍參賽 引發(fā)網(wǎng)友熱議

一名烏克蘭F-16飛行員死亡 澤連斯基誓言回應(yīng)

私自帶珍稀水稻種子出境獲刑兩年 種業(yè)安全警鐘長鳴
本賽季庫里罰球命中率93.3% 穩(wěn)居榜首
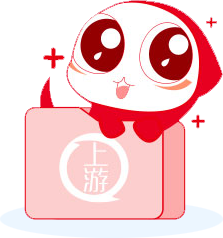
日本人大幅拋售美國國債,?自民黨高官表態(tài)

默茨稱將限制移民德國人數(shù) 減輕基礎(chǔ)設(shè)施壓力

宇田幸矢直言自己失誤過多,并不是對方實力有多強(qiáng)
為什么每年體檢無異常發(fā)現(xiàn)卻是晚期,?

美國威脅:美軍已準(zhǔn)備好了 若談判失敗將采取行動

關(guān)稅救不了美國制造 違背經(jīng)濟(jì)規(guī)律

陳藝文回應(yīng)“小熊”昵稱由來:小時候嬰兒肥特別壯
重慶回應(yīng)大量礦泉水倒入長江 祈福行為不被提倡

和平路與西三環(huán)互通立交全面通車 改善區(qū)域交通環(huán)境
火箭落后雷霆16個勝場 創(chuàng)歷史最大勝場差紀(jì)錄
相關(guān)新聞
中國首個14萬億大省誕生 廣東憑什么,?
2025-01-16 16:10:24中國首個14萬億大省誕生廣東憑什么國內(nèi)首個光子AI智能引擎在南京誕生
2025-03-03 10:11:05國內(nèi)首個光子AI智能引擎在南京誕生全球首個雙足骨骼機(jī)器人誕生 科技新突破
2025-02-25 01:04:50全球首個雙足骨骼機(jī)器人誕生國內(nèi)首個太空采礦機(jī)器人來了 開啟星際資源探索新篇章
2025-03-16 17:53:18國內(nèi)首個太空采礦機(jī)器人來了我國首個億噸級頁巖油田誕生 勘探取得重大突破
2025-03-26 03:36:20我國首個億噸級頁巖油田誕生30年來首個抗菌新藥或?qū)⒄Q生 幽門螺桿菌治療迎突破
2025-01-06 18:21:3030年來首個抗菌新藥或?qū)⒄Q生