當前位置:新聞 > 正文
美國研制出適應崎嶇路面的蜈蚣型機器人
新華社北京5月7日電美國科研人員從蜈蚣的運動方式中得到靈感,研制出擁有多節(jié)身體和多條腿的機器人,,能高效通過崎嶇不平的路面,,不必依賴傳感器隨時探測路面情況。
美國佐治亞理工學院的研究人員說,,他們開發(fā)出一個新的理論框架,,推算節(jié)肢型機器人在崎嶇路面上的通行效率,并制造出不同規(guī)格的機器人進行試驗,,發(fā)現(xiàn)腿比較多的機器人效率更高,。根據(jù)這種設計思路,可望研制出適合農田作業(yè)和救災等場合的新型搜救機器人,。相關論文發(fā)表在新一期美國《科學》雜志上,。
研究人員用3D打印技術制造小型的機器人身體,每節(jié)身體都有2條腿并配備數(shù)臺發(fā)動機,,然后讓腿數(shù)不同的機器人反復通過堆滿小方塊,、高低不平的路面,從指定起點前往60厘米遠處的終點,。結果發(fā)現(xiàn),,僅有6條腿的機器人表現(xiàn)很不穩(wěn)定,,每次試驗耗費的時間差異較大;而有14或16條腿的機器人通行更加快速,,而且每次耗費的時間差不多,。
人類行走在崎嶇環(huán)境中時必須小心觀察,根據(jù)路面情況隨時作出反應,,對機器人來說這就意味著需要配備大量傳感器,,會大幅提高成本,而且傳感器在惡劣環(huán)境中很容易損壞,。新型機器人將運動分段處理,,不需要根據(jù)傳感器的實時探測來調整動作,更加高效實用,。
推薦閱讀

中國品牌農產品亮相歐洲大型國際果蔬展
新華網(wǎng)2023-05-06 14:51:01
“中國文化所展現(xiàn)的和合之美讓人感動”
人民網(wǎng)-人民日報2023-05-06 05:41:04
研究估算186家美國銀行有“垮掉”風險
新華網(wǎng)2023-05-05 20:21:02
李亞鵬在小院種菜被警告后發(fā)視頻道歉
騰訊2023-05-07 10:11:28
美國一66歲男子射殺弟弟 尚不清楚他這么做的原因是什么
網(wǎng)易2023-05-07 09:33:16
女子吵架高空拋物獲刑10個月
中國青年網(wǎng)2023-05-07 09:11:38
俄防長:俄軍彈藥供應充足 特需武器產量猛增六倍 足以對敵人實施“有效火力殺傷”
參考消息2023-05-06 17:30:25
失蹤24年的沈云貴找到了 杜小華:希望小米奇也能快快回家
九派新聞2023-05-07 10:22:23
高校將男廁改女廁引爭議,在校學生普遍支持
快科技2023-05-07 08:16:41
“挖呀挖”黃老師直播惹爭議,,唱的挖呀挖或涉嫌侵權
每日經(jīng)濟新聞2023-05-07 10:55:38
歐盟外長談對華政策 歐洲需要有別于美國的對華政策
觀察者網(wǎng)2023-05-06 16:14:28
女子被大風吹飛多處骨折 網(wǎng)友:突然覺得胖一點可以接受了
新浪2023-05-07 08:53:38
加拿大這么對中國,,華盛頓在一旁偷笑
環(huán)球時報2023-05-07 10:18:52
烏方稱已完成90%以上反攻準備,但希望西方降低期望
參考消息2023-05-07 11:20:42
車臣領導人:愿率兵赴巴赫穆特作戰(zhàn)
參考消息2023-05-07 11:19:24
超9成網(wǎng)友不希望調休 人造長假,,“還不如不放”
齊魯晚報齊魯壹點2023-05-07 10:02:18
男子淄博吃完燒烤后買房定居 當事人:一直很喜歡這里,,并非沖動
九派新聞2023-05-07 09:01:45
李幼斌批評飯圈文化:長久不了,是種不正常的現(xiàn)象
北晚在線2023-05-07 11:05:01
俄一作家遭遇汽車爆炸 爆炸事件造成俄作家扎哈爾·普里列平骨折和腦震蕩
環(huán)球網(wǎng)2023-05-07 09:38:12
“中國航母只是宣傳品”,?英媒被打臉來得真快……
樞密院十號2023-05-07 10:16:30
老人得救后發(fā)出靈魂拷問:你也是來挖筍的嗎,?
北青網(wǎng)2023-05-07 10:44:18
大學生怒懟攤主用六兩秤 市監(jiān)局:屬實,,已告誡商販
搜狐2023-05-07 08:23:30
太可怕了!男子開車誤碾壓盲區(qū)女兒
湖北消防2023-05-07 09:41:04
賈躍亭被平安銀行申請限消 網(wǎng)友:人都在國外,這樣的操作還有意義嗎,?
搜狐2023-05-07 11:12:11
克宮遭襲的幾大疑點 俄首都防空為何表現(xiàn)“拉胯”
環(huán)球時報2023-05-07 09:25:43
俄打擊烏軍外國教官駐地 北約教官不僅訓練烏克蘭武裝部隊,,而且?guī)ьI他們發(fā)動攻擊
環(huán)球網(wǎng)2023-05-07 09:49:14
美4名蒙面小偷盜53支槍 警方已公布相關監(jiān)控畫面
海外網(wǎng)2023-05-07 09:22:58
韓駐美大使談對華關系 “我們必須與中國保持良好關系”
環(huán)球網(wǎng)2023-05-07 09:44:31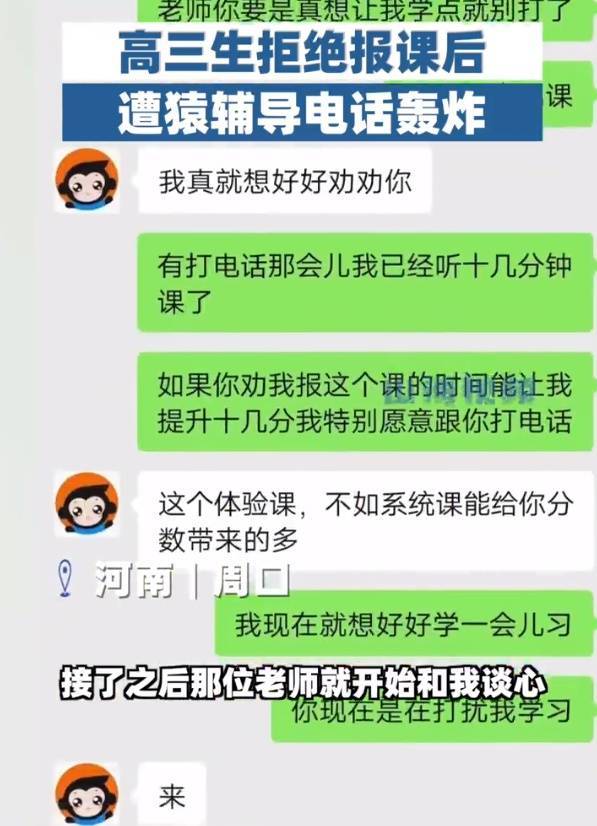
體驗1元公開課后學生拒絕報課被電話轟炸 猿輔導回應:會核實處理
搜狐2023-05-07 09:48:06
曝美正尋求美中防長會面 自“氣球事件”后,,中方多次拒接了來自美國防長奧斯汀或美軍最高將領米利的電話
環(huán)球網(wǎng)2023-05-07 09:56:17
一男子深夜持棍攔車后續(xù):精神有問題,他母親沒有出車禍
極目新聞2023-05-07 10:49:57
網(wǎng)友稱24人吃淄博燒烤花了760元,,在淄博吃燒烤吃的是氛圍
快科技2023-05-07 08:42:49
尹錫悅為岸田準備晚宴 隨后“最有可能”提供“深水炸彈”雞尾酒
環(huán)球網(wǎng)2023-05-07 09:42:15
岸田訪韓前夕,,韓民眾舉行“反日燭光抗議集會”
環(huán)球網(wǎng)2023-05-07 10:27:33
首次“全面部署” 美“福特”號航母正駛向歐洲
參考消息2023-05-07 11:18:16