飛船與空間站交會對接為何走走停停 揭秘關鍵技術背后的奧秘
交會對接是建設中國空間站的關鍵技術,,它使兩個航天器在同一時間、同一位置以相同速度和姿態(tài)會合并在結構上連為一個整體,。這一過程分為交會和對接兩個階段,。飛船在奔赴空間站時會“走走停停”,,這是為了確保安全和準確對接,。

在交會階段,飛船追蹤空間站的過程中,,通過變軌達到與空間站相同的軌道高度后,,兩飛行器相對距離和速度保持不變,,飛船相對于空間站來說就“停泊”了。這種“停泊”是由軌道規(guī)律保證的,,即被動安全,,只要不做動作,就沒有相撞風險,。設置停泊點主要用于以下操作或場景:

- 切換相對測量敏感器:從數(shù)百公里追蹤至對接過程中,,很難由一套設備從頭測到底。因此,,在與空間站相對距離不變且安全的停泊點進行不同測量距離的設備切換是最優(yōu)選擇,。 - 故障處置:在停泊點可以等待處理敏感器等典型故障,有些交會方案將停泊點作為全系統(tǒng)狀態(tài)檢查的點,,確認一切正常才放行,。 - 對接時間調整:如軌控執(zhí)行有誤差,則飛行時間與預計也會有偏差,,設置停泊點可以“吃掉”此前的飛行時間誤差,,以保證后續(xù)步驟按預定時間計劃執(zhí)行。 - 解決光學敏感器受陽光干擾的問題:當陽光晃眼時在停泊點等待,,太陽轉過去后再繼續(xù)前進,。停泊點可以設置在空間站的后方或前方,根據(jù)需要進行升降軌操作,。

交會有自動與手動兩種模式,。高精度自動控制條件下,手動交會仍然保留,,這是因為人眼精準的立體視覺和人腦-手指精細的操控能力使得航天員經(jīng)過訓練后可以達到極高的觀測和控制精度,。手動交會的一大優(yōu)勢在于控制精度好,并且人在現(xiàn)場的臨機處置能力更強,。早期由于技術水平限制,,自控不如人控精度高。當代雖然自動控制精度足夠高且穩(wěn)定,,但人控作為一種冗余手段被保留下來,。

多地密集開啟新一輪搶人計劃 真金白銀吸引青年人才
分析師:GTC大會將提振對英偉達信心 創(chuàng)新成果引關注

趙露思陳偉霆許我耀眼預約破150萬 粉絲期待高漲

愛國商人霍英東曾遭美西方打壓40年 家國情懷與商業(yè)邏輯的碰撞

瘦人不會得脂肪肝?錯,!防治脂肪肝遠離七大誤區(qū) 改變生活方式是關鍵
梅德韋杰夫用菜品比喻歐盟和英法烏

美股周二全線收跌 科技股普遍下挫

名嘴:特朗普根本是假的和平主義者 中東戰(zhàn)火再燃玄機何在

烏軍撤離庫爾斯克遭遇了什么 重裝備損失嚴重

周杰倫在周杰倫模仿大賽沒得第一 網(wǎng)友:周杰倫不會變老,,只會變多

牛彈琴:美俄要精誠合作了 特朗普普京通話成果顯著

加拿大總理訪歐給美國臉色 尋求盟友支持
中方強烈譴責以色列再次挑起戰(zhàn)火 呼吁立即停止軍事行動
分析師:GTC大會將提振對英偉達信心 創(chuàng)新成果引關注

特朗普普京打完電話 美俄要精誠合作 開啟全面合作新篇章

幼童墜河 母親催促自己兒子下河救人

澤連斯基:想了解俄美元首通話細節(jié),我不信任普京
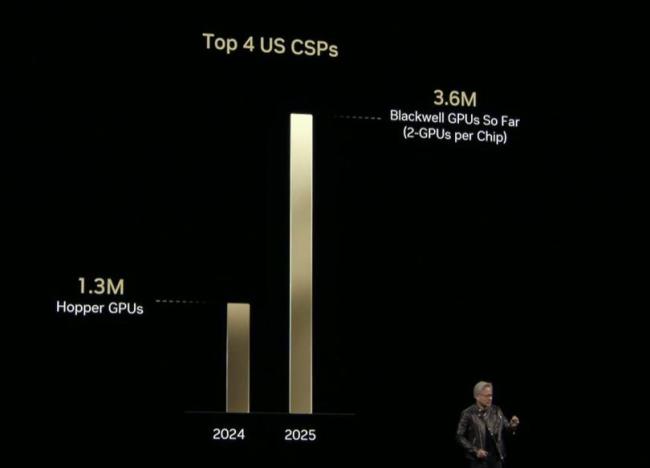
黃仁勛公布一年一更的芯片路線圖 技術藍圖再升級
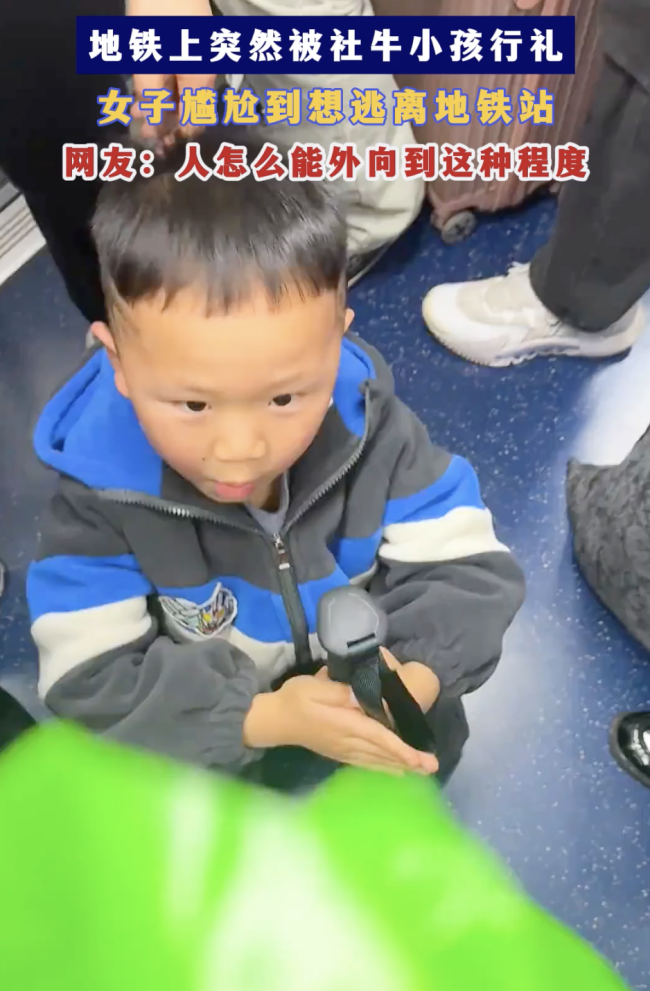
女子地鐵上突然被男孩行禮,,網(wǎng)友:人怎么能外向到這種程度,!
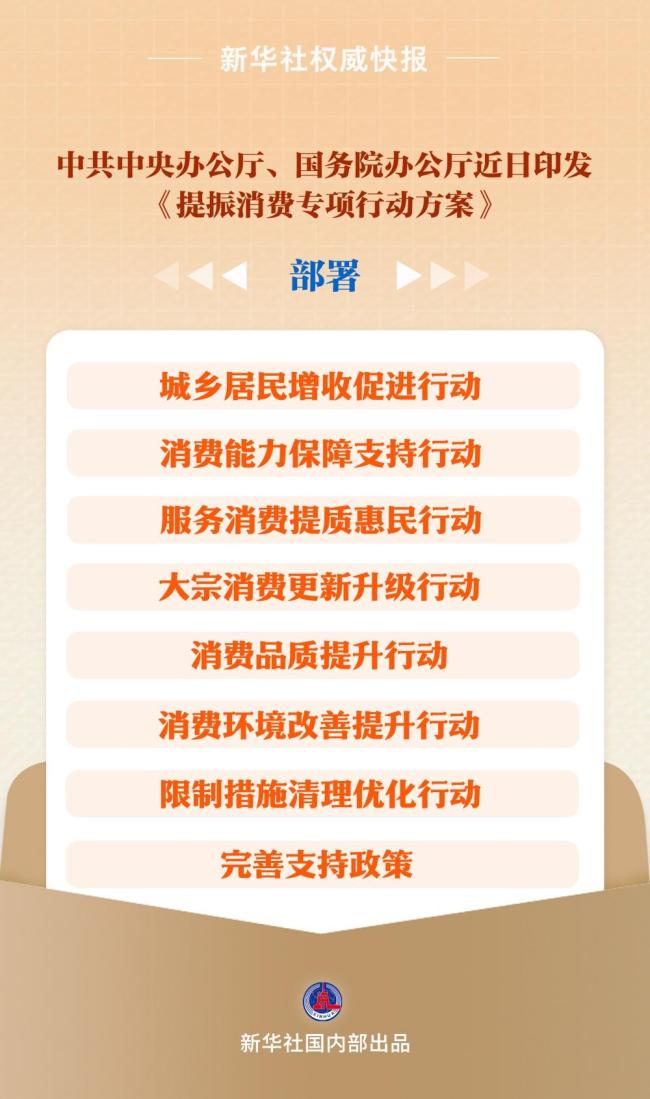
工資、住房,、育兒都在這里,!提振消費“30條“來了:全面促進居民增收

巴以沖突局勢為何再次急轉直下 和談成果一夜歸零?
拜登肖像照被自動簽名筆取代 特朗普諷刺引發(fā)討論
趙露思陳偉霆許我耀眼預約破150萬 粉絲期待高漲

2024年北京海關截獲外來物種869種次,,同比增長2.1倍 “異寵”風險加劇

男童尿急母親讓其尿入飯店杯具中

假期打算自駕出行的朋友注意啦,,這8天免費! 清明勞動節(jié)免通行費
男子為漲粉造謠“救人被撞”,?警方:行拘5天 網(wǎng)絡謠言毒瘤再現(xiàn)

已解放庫爾斯克31個定居點,!俄公布繳獲武器畫面 烏軍補給線被切斷

英法此時威脅俄羅斯有何意味 虛張聲勢?

王楚欽說一切都很好也會更好 奪冠展現(xiàn)強大實力
女生誤診淋巴瘤后確診骨肉瘤 在生日當天簽下截肢手術同意書

解放軍“登陸神器”現(xiàn)身背后 揭示未來動向

李嘉誠賣港口 香港兩任特首發(fā)聲 交易或有轉機
多地密集開啟新一輪搶人計劃 真金白銀吸引青年人才
臺灣大爺遇大陸游客 直呼:祖國的
相關新聞
神舟十九號與空間站組合體完成自主快速交會對接
剛剛,,神舟十九號載人飛船與空間站組合體完成自主快速交會對接,。按任務計劃,3名航天員隨后將從神舟十九號載人飛船進入空間站天和核心艙
2024-10-30 11:27:32神舟十九號載人飛船與空間站組合體完成自主快速交會對接全流程,!多視角回顧天舟八號與空間站交會對接
北京時間2024年11月16日2時32分,,天舟八號貨運飛船成功對接于空間站天和核心艙后向端口。交會對接完成后,,天舟八號將轉入組合體飛行段,。
2024-11-16 08:19:09全流程!多視角回顧天舟八號與空間站交會對接為何我國要夜間發(fā)射神舟飛船 精準對接需求
2024-10-30 13:25:57為何我國要夜間發(fā)射神舟飛船俄貨運飛船與國際空間站對接 順利完成自動對接
2024-11-25 09:48:06俄貨運飛船與國際空間站對接俄羅斯“進步MS-29”貨運飛船與國際空間站對接
俄羅斯國家航天集團11月23日在其官網(wǎng)發(fā)布消息說,俄“進步MS-29”貨運飛船當天與國際空間站完成對接,。
2024-11-24 07:47:12俄羅斯“進步MS-29”貨運飛船與國際空間站對接現(xiàn)場:俄飛船與國際空間站完成對接 飛船載有俄美3名宇航員
2024-09-12 09:54:55現(xiàn)場:俄飛船與國際空間站完成對接