Atlas機器人越來越像人了,,強化學習加持爬行,、翻跟頭,、跳街舞,!
Atlas機器人越來越像人了,強化學習加持爬行,、翻跟頭,、跳街舞!最近,,國內(nèi)各種人形機器人紛紛亮相,,效果令人驚嘆。作為該領域的老牌玩家,,波士頓動力終于展示了其最新成果,。昨天,他們發(fā)布了一段長達一分鐘的視頻,,展示了Atlas機器人的多項新技能,。視頻中,Atlas不僅能跑,、能爬,,還能翻跟頭、跳街舞,,動作流暢自然,。
這次演示中,波士頓動力采用了基于動作捕捉技術的強化學習策略,,使得Atlas的動作更加接近人類,。除了基本的走、跑,、爬之外,,Atlas還學會了更復雜的動作。例如,,它能夠輕松地翻跟頭,,并且在翻跟頭時調(diào)整姿勢以保持平衡,。此外,,Atlas還展示了倒立翻跟頭和倒立側翻等高難度動作,,令人印象深刻。
據(jù)專家分析,,Atlas展現(xiàn)了全尺寸(1.8米級)機器人運動控制領域的三項突破性進展,。首先是基于新型電驅(qū)一體化關節(jié)結構的強化學習框架,實現(xiàn)了全動作域覆蓋,,通過軌跡跟蹤與動作模仿技術成功復現(xiàn)了人類基礎運動模式,。其次,硬件平臺驗證了基于動畫領域高階表征的機器人動作實例化路徑可行性,。最后,,系統(tǒng)性工程化能力構建了可擴展的機器人控制范式,為后續(xù)高階規(guī)劃器與通用運動控制器的研發(fā)奠定了基礎,。
目前,,幾乎所有前沿人形機器人研究者都意識到,這種強化學習動作模仿技術的重要性,。如果一條軌跡可以被如此精確和穩(wěn)定地跟蹤,,那么生成模型的思想可以被引入到任意動作生成領域。當前的技術邊界主要體現(xiàn)在非結構化環(huán)境感知領域,,如動態(tài)干涉約束下的主動視覺感知系統(tǒng),、端到端在線建圖以及基于人類行為表征的感知-動作閉環(huán)等方面仍需理論突破。
Atlas的發(fā)展歷程也頗具代表性,。其歷史可追溯到美國國防高級研究計劃署(DARPA)早期的一個項目——PETMAN,。2013年7月,Atlas首次亮相,,最初需要外部電源支持,。2015年初,Atlas完成了進化,,脫離了電纜束縛,。2016年,新版Atlas發(fā)布,,具備更強的敏捷性和動態(tài)運動能力,。2017年至2019年間,Atlas不斷進步,,能夠完成跳躍,、后空翻等復雜動作。2020年,,Atlas已經(jīng)能夠完成整個跑酷過程,。2024年4月17日,,波士頓動力推出了全新的全電動Atlas機器人,標志著一個新時代的到來,。
電動Atlas的關鍵增強功能在于其人工智能和機器學習能力的集成,。波士頓動力表示,他們正在讓Atlas學會在工廠里擺放零件,,并認為機器人只有在真實世界中出色完成工作才具有價值,。這與過去那個只會跑酷、秀空翻的Atlas有所不同,。在最新的視頻中,,Atlas開始在工廠里認真干活,練習從狹窄的料架上拾取零件,,增進手部靈活性,,并熟悉周圍環(huán)境。
波士頓動力公司CEO Robert Playter表示,,他們正與RAI Institute合作,,加速Atlas機器人的核心能力,使其成為人們生活中寶貴的工具,。未來,,這位“跑酷王”還將解鎖更多新技能。
“普特會”何時成行,?克宮回應:我們需要為此做好準備

女孩配OK鏡醫(yī)院給成他人鏡片 醫(yī)生:是工作人員一個非常低級的疏漏

穿著紙尿褲丟撒孩···盤點潑水節(jié)“戰(zhàn)斗力爆表”的萌娃們!

剛剛收購Intel閃存:SK海力士在中國的第二座工廠不幸擱置 NAND市場不確定性影響投資

離開中國后,,“甲亢哥”:想念“鹵鵝哥” 會帶他去美國 真摯友情跨越國界

美方糾錯的步子應該邁得更大一些 關稅松動信號顯現(xiàn)

臺民調(diào)稱近六成民眾反對“大罷免” 主流民意不贊成
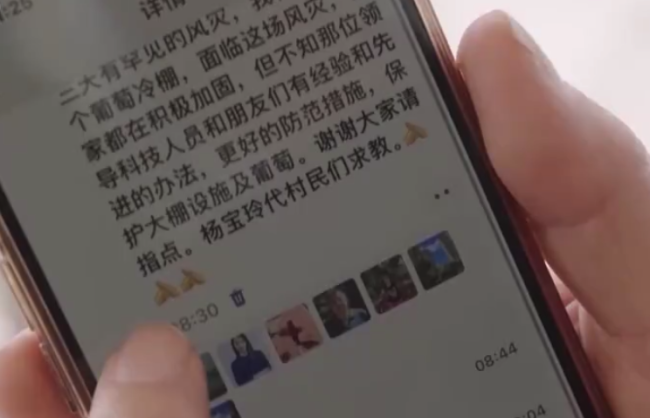
9級大風前村里上演葡萄保衛(wèi)戰(zhàn),!朋友圈的一條求助信息400畝葡萄成功保住

一名烏克蘭F-16飛行員死亡 澤連斯基誓言回應
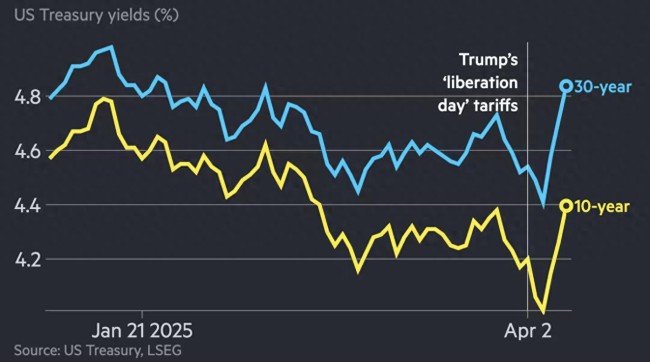
日本人大幅拋售美國國債?自民黨高官表態(tài)
12 名 OpenAI 前員工支持馬斯克訴訟,,直指公司重組違反非營利使命 案件添新關注點

俄羅斯最新涉華表態(tài) 中俄石油合作前景廣闊

尹錫悅出席公審 首場審判開啟
穿著紙尿褲丟撒孩···盤點潑水節(jié)“戰(zhàn)斗力爆表”的萌娃們,!

辟謠美國建廠!百余股火速回應穩(wěn)信心:關稅影響有限 澄清聲明穩(wěn)定市場情緒

美國商戶仍愿意繼續(xù)買中國產(chǎn)品 性價比高成首選

美政府威脅取消哈佛大學經(jīng)費被起訴 學術自由受威脅

好身體計劃9個動作,,消防員帶你高效燃脂,,一起練起來!

茅臺集團赴比亞迪拜訪交流 共探科技創(chuàng)新融合之路

女司機走錯道想變道出主路,,結果動手將欄桿搬開了

廣州出現(xiàn)AI洗頭,,全自動洗頭真的來了!

美國高管一家5口墜機遇難 美直升機無記錄儀 事故調(diào)查面臨挑戰(zhàn)
女孩配OK鏡醫(yī)院給成他人鏡片 醫(yī)生:是工作人員一個非常低級的疏漏

歐盟與美國關系永遠不會回到過去 貌合神離多事之秋
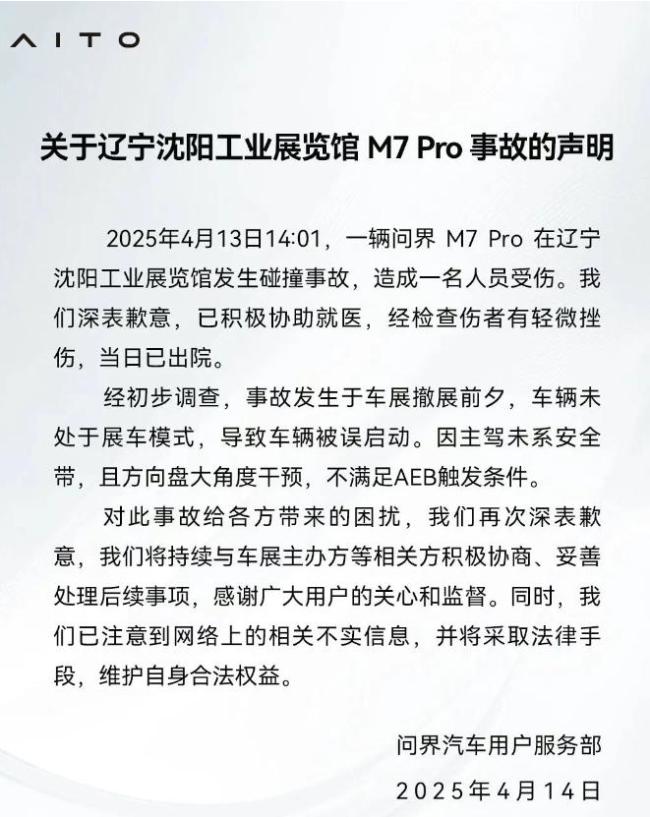
問界M7沈陽車展事件 誤啟動致輕微傷
景德鎮(zhèn)車禍肇事方已轉(zhuǎn)讓店面 出事后很快就搬走

歐盟磋商設立共同防務基金 促進統(tǒng)一軍購

美國一架客機突然中止起飛 前輪振動引發(fā)濃煙
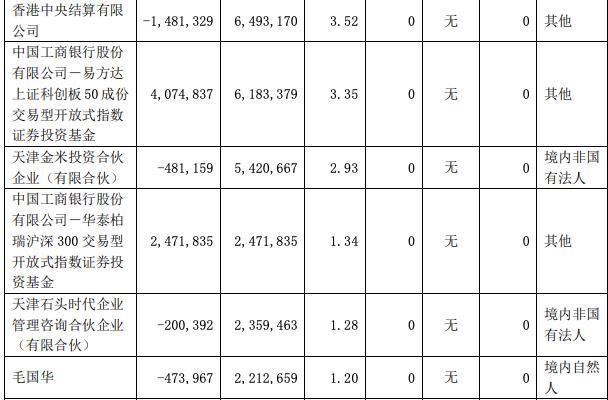
石頭科技董事長已套現(xiàn)近9億 大股東持續(xù)減持引發(fā)關注

關稅救不了美國制造 違背經(jīng)濟規(guī)律

四川一罐車排放不明液體入河,,官方回應,!

一季度進口下降,受鐵礦煤炭原油大豆等大宗商品價格下跌影響 多因素共同作用結果
歐洲芯片廠齊聲警告加稅風暴 恐雪上加霜

中國進口的美國商品正在被他國替代 關稅戰(zhàn)引發(fā)產(chǎn)業(yè)鏈重構
“普特會”何時成行?克宮回應:我們需要為此做好準備
相關新聞
波士頓動力機器人Atlas已進廠打工 實現(xiàn)全自動工作
2024-11-01 10:08:02波士頓動力機器人Atlas已進廠打工人形機器人越來越全面了 走進千行百業(yè)
2025-03-23 12:26:29人形機器人越來越全面了尹同躍:汽車越來越像快消品
2024-10-18 14:18:05尹同躍:汽車越來越像快消品甜馨回應變白了,,網(wǎng)友:真的越來越像媽媽了
2025-02-28 14:23:13甜馨回應變白了硬核父子自制機器人:像科幻大片,,外交部發(fā)言人點贊
2025-03-06 12:08:04硬核父子自制機器人美媒:中國反制措施越來越像美國了 反擊美方限制政策
2025-01-18 20:10:23美媒