機(jī)器狗能當(dāng)羽毛球搭子了 強(qiáng)化學(xué)習(xí)助力精準(zhǔn)擊球
來和機(jī)器狗一起運(yùn)動(dòng)吧,你的羽毛球搭子來了,。通過強(qiáng)化學(xué)習(xí),,機(jī)器狗學(xué)會(huì)了獨(dú)立打羽毛球,無論是在室外還是室內(nèi)都能應(yīng)對(duì)自如,。
研究人員開發(fā)了全身視覺運(yùn)動(dòng)控制策略,,同步控制機(jī)器狗的腿部移動(dòng)和手臂揮拍動(dòng)作。最終,,機(jī)器狗的最高揮拍速度達(dá)到了12米/秒,。在與人類選手的比賽中,某一回合連續(xù)擊球10次,,甚至出現(xiàn)了擊球后回位中心的類人行為,。該研究在各種環(huán)境中進(jìn)行了大量實(shí)驗(yàn),驗(yàn)證了四足機(jī)器人預(yù)測(cè)羽毛球軌跡,、有效導(dǎo)航服務(wù)區(qū)域以及對(duì)人類球員進(jìn)行精準(zhǔn)打擊的能力,,證明了足式移動(dòng)機(jī)器人在復(fù)雜和動(dòng)態(tài)體育場(chǎng)景中的應(yīng)用可行性,。研究團(tuán)隊(duì)來自蘇黎世聯(lián)邦理工學(xué)院,相關(guān)論文發(fā)表在《科學(xué)·機(jī)器人》雜志上,。
學(xué)會(huì)打羽毛球的機(jī)器狗配置如下:主體由一個(gè)四足ANYmal-D底座和一個(gè)動(dòng)態(tài)手臂DynaArm組成,。它配備了一個(gè)帶有全局快門的ZED X立體相機(jī)用于羽毛球感知。相機(jī)計(jì)算出的羽毛球位置和機(jī)器人本體感知觀測(cè)值一起被輸入到強(qiáng)化學(xué)習(xí)策略中,。然后生成關(guān)鍵指令來控制四足底座,。羽毛球拍相對(duì)于腕關(guān)節(jié)呈45°角定向,這是根據(jù)早期仿真測(cè)試得出的最佳配置,。在部署過程中,,機(jī)器狗以400 Hz的頻率運(yùn)行,同時(shí)機(jī)器人控制策略以100 Hz的速率更新觀測(cè)值并發(fā)送關(guān)節(jié)位置指令,。系統(tǒng)的感知模塊包括羽毛球位置測(cè)量,、狀態(tài)估計(jì)和軌跡預(yù)測(cè),以60 Hz的頻率異步運(yùn)行,。
基于這個(gè)配置,,機(jī)器狗和人類業(yè)余羽毛球選手進(jìn)行了比賽。盡管存在一些失誤,,但機(jī)器狗能夠根據(jù)不同速度和落點(diǎn)的來球做出適當(dāng)反應(yīng),。平均來說,感知模塊在對(duì)手機(jī)球后需要花費(fèi)0.357秒來判斷攔截軌跡,。通常,,羽毛球會(huì)在0.654秒后達(dá)到四足底座上方1.25米然后被攔截。記錄中,,機(jī)器狗從預(yù)測(cè)到擊球最快耗時(shí)0.367秒,。在官方放出的視頻中,有一次對(duì)打進(jìn)行了10次連續(xù)擊球,。每次擊球后,,機(jī)器狗會(huì)自動(dòng)向球場(chǎng)中心移步,類似于人類玩家調(diào)整站位和站姿為下一次擊球做準(zhǔn)備,。
在給定真實(shí)感知的情況下,,研究人員評(píng)估了在指令揮拍時(shí)間到達(dá)攔截位置0.1米范圍內(nèi)的擊球百分比。仿真結(jié)果表明,,在發(fā)球區(qū),,機(jī)器狗攔截來球幾乎一攔一個(gè)準(zhǔn),失敗率可忽略不計(jì),。但在發(fā)球區(qū)邊界或羽毛球直接落在機(jī)器狗身后時(shí),,預(yù)測(cè)羽毛球軌跡并成功攔截就變得非常困難。當(dāng)羽毛球從正上方或正后方接近機(jī)器狗時(shí),,它必須直接向上俯仰,,這對(duì)機(jī)器狗來說很有難度,。執(zhí)行10m/s的揮拍速度時(shí),,機(jī)器狗基本都能跟蹤指令速度,;速度超過10m/s時(shí),精度就會(huì)下降,。當(dāng)命令其以19m/s揮拍時(shí),,機(jī)器狗出現(xiàn)了最高執(zhí)行速度,即12.06m/s,。相比之下,,業(yè)余羽毛球運(yùn)動(dòng)員可以達(dá)到20m/s至30m/s的揮拍速度。系統(tǒng)在接近其電流和關(guān)節(jié)速度極限的情況下運(yùn)行以實(shí)現(xiàn)這些指令,。更高的指令速度導(dǎo)致基座角速度增加,,表明基座姿態(tài)控制與操作器揮動(dòng)之間存在耦合。球拍在指令的擊球時(shí)刻精確到達(dá)其最近點(diǎn),。在指令12m/s揮拍時(shí),,機(jī)器狗執(zhí)行的平均揮拍速度為10.8m/s,平均位置誤差為0.117米,。換句話說,,當(dāng)球拍以目標(biāo)速度移動(dòng)時(shí),僅有0.0108秒的偏移,。
在整個(gè)羽毛球大戰(zhàn)中,,機(jī)器狗會(huì)自主學(xué)習(xí)動(dòng)態(tài)調(diào)整相機(jī)姿態(tài),根據(jù)任務(wù)緊迫性動(dòng)態(tài)調(diào)整步態(tài),,包括短距離微調(diào)姿態(tài),、中距離不規(guī)則步態(tài)、長距離類疾馳步態(tài)等,。例如,,它以快跑進(jìn)行遠(yuǎn)距離快速攔截,并在近距離回?fù)魰r(shí)穩(wěn)定,,動(dòng)態(tài)協(xié)調(diào)手臂和腿部,。
打羽毛球的難點(diǎn)在于需要復(fù)雜的步法和上肢運(yùn)動(dòng)之間的相互協(xié)調(diào)。對(duì)機(jī)器狗來說,,這也是一項(xiàng)需要精確協(xié)調(diào)感知,、移動(dòng)和手臂揮動(dòng)的任務(wù)。更進(jìn)一步來說,,需要在動(dòng)態(tài)環(huán)境中協(xié)調(diào)下肢與上肢之間的運(yùn)動(dòng),,并使肢體控制與感知對(duì)齊。這不僅依賴于硬件,,還取決于控制算法,。當(dāng)前控制器和硬件存在不足,,而羽毛球?qū)Ω兄⒁苿?dòng)和操作之間復(fù)雜的相互作用提出了極高的要求,,需要平衡“快速響應(yīng)的移動(dòng)”與“精確的手臂運(yùn)動(dòng)”,。
研究團(tuán)隊(duì)提出了一種基于強(qiáng)化學(xué)習(xí)的統(tǒng)一控制策略,用于涉及所有自由度的全身視覺運(yùn)動(dòng)技能,,以實(shí)現(xiàn)有效的羽毛球跟蹤和擊打,。該策略利用真實(shí)世界相機(jī)數(shù)據(jù)的感知噪聲模型提供信息,確保仿真與部署之間感知誤差水平的一致性,,并促進(jìn)學(xué)習(xí)主動(dòng)感知行為,。此外,該方法還包括一個(gè)羽毛球預(yù)測(cè)模型和用于魯棒運(yùn)動(dòng)控制的約束強(qiáng)化學(xué)習(xí),,以增強(qiáng)部署準(zhǔn)備度,。與基準(zhǔn)相比,在沒有明確的視野范圍獎(jiǎng)勵(lì)的情況下,,機(jī)器狗即可實(shí)現(xiàn)更低的感知誤差和更高效的機(jī)械功率使用,。當(dāng)前系統(tǒng)主要依賴一個(gè)商用立體相機(jī)上的擴(kuò)展卡爾曼濾波器(EKF)進(jìn)行羽毛球狀態(tài)估計(jì)。未來可以通過整合額外的傳感模態(tài)來改進(jìn),,例如通過扭矩和聲音進(jìn)行沖擊檢測(cè),,或加入額外的RGB、深度或事件相機(jī),,以增強(qiáng)機(jī)器人在更激烈的游戲場(chǎng)景中的物理交互響應(yīng),。鑒于人類球員通常通過觀察對(duì)手動(dòng)作來預(yù)測(cè)羽毛球軌跡,人體姿態(tài)估計(jì)也可能是一種提高策略性能的有價(jià)值模態(tài),。
58歲鄭伊健被指體型發(fā)胖舞蹈無力 網(wǎng)友感慨青春不再

血鉛異常幼兒園老師發(fā)聲 違規(guī)添加劑致幼兒中毒

增城6個(gè)掛綠荔枝售價(jià)298元 珍稀佳果引關(guān)注

西方學(xué)者妄議臺(tái)灣地位高志凱回?fù)簦?/a>

小哥高溫天中暑倒地 好心人救助 好人應(yīng)有好報(bào)

特朗普:即將公布各國關(guān)稅信函 談判最后期限或延后

十幾個(gè)外甥暑假到舅舅家每天吃8斤米 親情的溫暖密碼

“美國黨”會(huì)有啥政治主張 科技資本的突圍嘗試

馬斯克只想給自己出口惡氣,,至少會(huì)給特朗普添堵設(shè)障

柬埔寨也要“倒戈”西方?博主解讀 洪馬內(nèi)野心真大

樸寶劍曬與劉詩詩李庚希自拍 同框畫面宛如偶像劇

煙臺(tái)南山學(xué)院學(xué)生稱每年學(xué)費(fèi)上萬 高學(xué)費(fèi)低條件引爭(zhēng)議

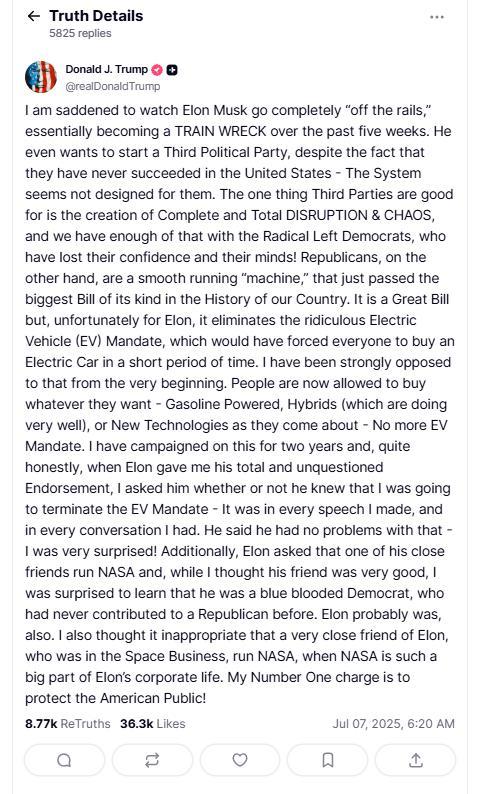
完全脫軌失控,!從第一朋友到互撕,,特朗普和馬斯克“塑料兄弟情”就一年

外交部回應(yīng)“印度稱中國借刀殺人”:不針對(duì)第三方

馬斯克說美財(cái)長連數(shù)學(xué)都算不好 口水戰(zhàn)升級(jí)

烏克蘭會(huì)成第二個(gè)廣島嗎 俄軍這一炸開啟歷史了

印度男孩臥軌拍火車從身上駛過視頻 同伴歡呼雀躍
以色列能否重創(chuàng)胡塞武裝 也門荷臺(tái)達(dá)市遭以色列密集空襲

孫穎莎著急時(shí) 邱貽可及時(shí)“順毛” 耐心調(diào)整顯成效

專家:馮德萊恩手中無牌可打 中歐經(jīng)貿(mào)爭(zhēng)端升級(jí)

國足vs韓國 東亞杯首戰(zhàn)開啟
業(yè)主欠費(fèi)60萬元 頭部物業(yè)公司不干了 多家頭部物業(yè)撤場(chǎng)

賈靜雯大女兒稱與繼母是好姐妹 分享溫馨相處點(diǎn)滴
柬埔寨與美達(dá)成協(xié)議白宮為何秘而不宣 特朗普3喜臨門?
血鉛異常幼兒園老師發(fā)聲 違規(guī)添加劑致幼兒中毒

為何總讓香港群眾先看航母 民族自豪感的回歸
中百萬大獎(jiǎng)遭攤主奪票女子順利兌獎(jiǎng) 糾紛終獲解決

特朗普稱得州洪災(zāi)是拜登的錯(cuò),!
揮旗哥用軍強(qiáng)民樂標(biāo)語送別山東艦 港民深情歡送

88年了我們不曾忘不能忘不敢忘 銘記歷史珍愛和平
增城6個(gè)掛綠荔枝售價(jià)298元 珍稀佳果引關(guān)注
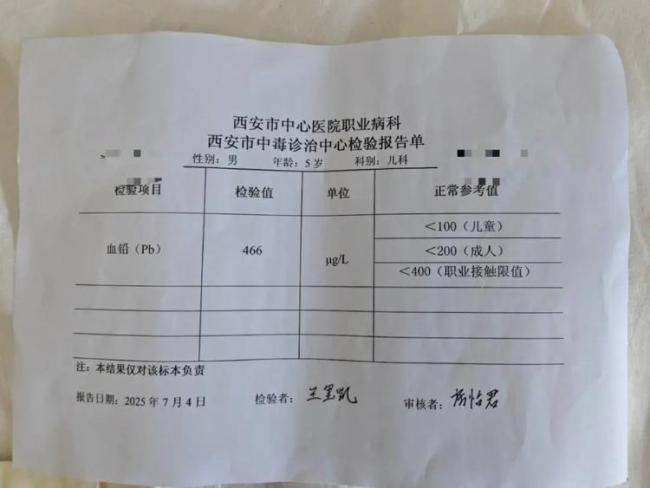
專家談甘肅幼兒園鉛中毒事件 血鉛超標(biāo)引擔(dān)憂
特朗普稱馬斯克或是民主黨,?博主解讀

侵華日軍細(xì)菌戰(zhàn)又添鐵證 珍貴檔案首次公開
58歲鄭伊健被指體型發(fā)胖舞蹈無力 網(wǎng)友感慨青春不再
相關(guān)新聞
國產(chǎn)機(jī)器狗來拜年了!國產(chǎn)機(jī)器狗變身舞蹈達(dá)人
1月22日,,云深科技發(fā)布旗下“山貓”機(jī)器狗靈活雪中秀的視頻,,還放煙花祝大家蛇年吉祥。視頻中,,機(jī)器狗在野外跋山涉水還可以完成空翻,、沖跳、極低跑酷等動(dòng)作。...
2025-01-24 01:48:52國產(chǎn)機(jī)器狗變身舞蹈達(dá)人王興興極限測(cè)試機(jī)器狗 國產(chǎn)機(jī)器狗反超波士頓動(dòng)力
在一條筆直的公路上,,四足機(jī)器人“黑豹”正加速追趕前方奔跑的運(yùn)動(dòng)員,。鏡頭從俯瞰到平視,記錄下機(jī)器人反超的過程,,定格的一瞬,,“黑豹”只留下一道黑色殘影
2025-02-23 14:24:14王興興極限測(cè)試機(jī)器狗機(jī)器狗遇柴犬兩狗互相拜年
機(jī)器狗遇柴犬兩狗互相拜年近日,福建一柴犬上街遇到機(jī)器狗,,“兩狗”互相拜年引路人圍觀,。有網(wǎng)友調(diào)侃:柴犬在拜見金剛大哥,。...
2025-01-13 10:55:36機(jī)器狗遇柴犬兩狗互相拜年當(dāng)真狗遇上機(jī)器狗 奇妙互動(dòng)引關(guān)注
2025-03-05 12:23:22當(dāng)真狗遇上機(jī)器狗泰山機(jī)器狗馱載重物
2025-02-26 09:35:40泰山機(jī)器狗馱載重物機(jī)器狗在北京上路巡邏 效率提升3倍 科技賦能城市治理
2025-03-08 21:10:36機(jī)器狗在北京上路巡邏效率提升3倍