馬斯克展示機器人征服崎嶇地形 自主平衡行走
馬斯克展示機器人征服崎嶇地形
特斯拉發(fā)布了一段視頻,,展示了其人形機器人Optimus在復雜地形上行走的最新進展。視頻中,,Optimus能夠在布滿護根物的山丘斜坡上穩(wěn)步行走,。特斯拉CEO埃隆·馬斯克表示,,該機器人通過神經(jīng)網(wǎng)絡控制其電動肢體,在這種崎嶇的地形上行走無需遠程操控,。
特斯拉Optimus工程副總裁米蘭·科瓦奇也轉(zhuǎn)發(fā)了這段視頻,,并指出機器人并未使用視覺系統(tǒng),完全依靠自身的平衡能力應對復雜地形,。他還提到自己曾在同一位置滑倒過,,這表明地形確實非常復雜。特斯拉計劃未來為Optimus增加視覺系統(tǒng),,并進一步改進其行走姿態(tài),、響應速度和跌倒恢復能力。
近期,,特斯拉還發(fā)布了Optimus使用新型機械手接球的視頻,,盡管目前仍需遠程操控,但馬斯克預計Optimus將在明年實現(xiàn)自主接球,。特斯拉計劃在今年年底前為Optimus配備具有22個自由度的雙手,。此外,特斯拉預計將在2026年開始大規(guī)模生產(chǎn)Optimus,,并計劃在2027年前交付給外部客戶,。目前,Optimus已經(jīng)在特斯拉工廠中承擔了一些簡單任務,,例如電池分類,。
(責任編輯:張蕾)
關閉

海灣杯出局一地雞毛,沙特主帥被質(zhì)疑不如曼奇尼
海灣杯出局一地雞毛2025-01-02 13:47:56
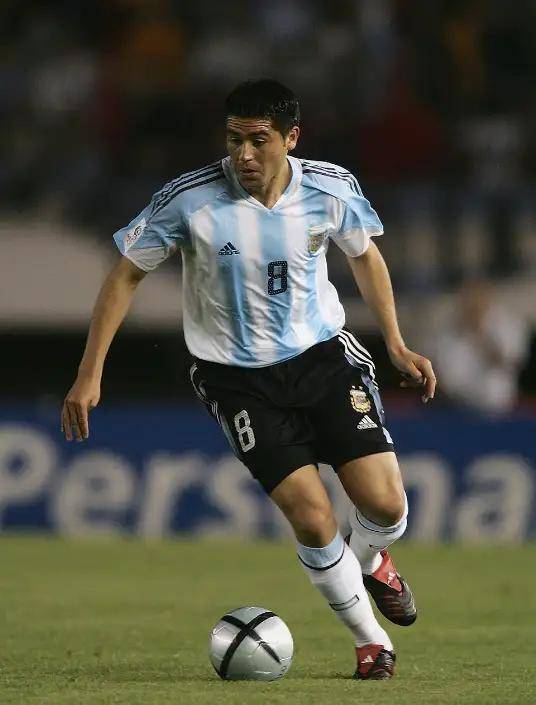
里克爾梅為什么被稱為是最后一個古典前腰,? 現(xiàn)代足球的變革所致
里克爾梅為什么被稱為是最后一個古典前腰2025-01-02 13:45:40

高血壓患者這幾種食物要少吃,,小心血壓升高
高血壓患者這幾種食物要少吃2025-01-02 13:45:20

韓墜毀客機兩個黑匣子處理進展 事故已致124人死亡
韓墜毀客機兩個黑匣子處理進展2025-01-02 13:30:05

渝湘復線高速預計2025年內(nèi)全線通車 部分路段已開放通行
渝湘復線高速預計2025年內(nèi)全線通車2025-01-02 13:34:40

霉霉登上央視2024世界新聞年鑒 回顧一年熱點事件
霉霉登上央視2024世界新聞年鑒2025-01-02 13:36:50

韓代總統(tǒng)崔相穆同一天做了兩件事 政壇風波再起
韓代總統(tǒng)崔相穆同一天做了兩件事2025-01-02 13:24:46

專家:美以低估了胡塞武裝的實力 警告無效凸顯韌性
以低估了胡塞武裝的實力2025-01-02 13:34:08

火箭擒獨行俠 申京格林圍剿歐文 火箭五人上雙鎖定勝局
火箭擒獨行俠申京格林圍剿歐文2025-01-02 13:32:18
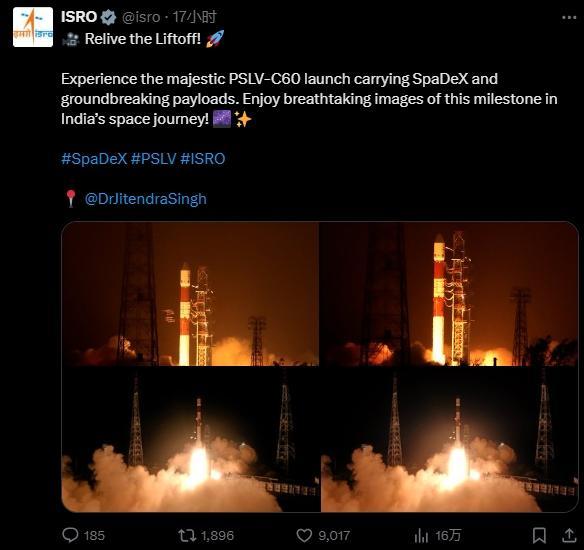
印媒:印即將加入中美俄精英俱樂部 太空對接技術迎突破
印媒,印即將加入中美俄精英俱樂部2025-01-02 13:46:14

韓國空難是天災還是人禍 悲劇引發(fā)深思
韓國空難是天災還是人禍2025-01-02 13:32:43

燒傷媽媽皮膚康復狀態(tài)良好,跟丈夫感謝了所有幫助他們的人
燒傷媽媽皮膚康復狀態(tài)良好2025-01-02 13:40:48

新年第一天,,俄軍紅軍城鉗形攻勢雛形初現(xiàn),,烏軍逃離庫拉霍夫發(fā)電廠!
新年第一天,,俄軍紅軍城鉗形攻勢雛形初現(xiàn),,烏軍逃離庫拉霍夫發(fā)電廠!2025-01-02 13:40:57

濟州客機事故暴露多重隱患 跑道短與鳥擊風險加劇問題
濟州客機事故暴露多重隱患2025-01-02 13:42:56
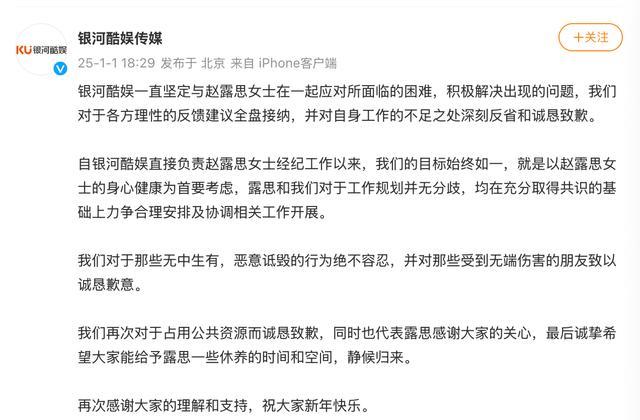
銀河酷娛稱與趙露思工作規(guī)劃并無分歧,,始終以趙露思女士的身心健康為首要考慮
銀河酷娛稱與趙露思工作規(guī)劃并無分歧2025-01-02 13:43:26
伊朗最高領袖哈梅內(nèi)伊下定決心要找接班人了 誰將領航伊朗未來,?
伊朗最高領袖哈梅內(nèi)伊下定決心要找接班人了2025-01-02 13:43:57
李稻葵解讀公積金異地互通 順應人口流動大趨勢
李稻葵解讀公積金異地互通2025-01-02 13:39:24

韓國空難一個錯誤連著一個錯誤 多因素釀成慘劇
韓國空難一個錯誤連著一個錯誤2025-01-02 13:22:56
里克爾梅為什么被稱為是最后一個古典前腰? 現(xiàn)代足球的變革所致
里克爾梅為什么被稱為是最后一個古典前腰2025-01-02 13:45:40
高血壓患者這幾種食物要少吃,小心血壓升高
高血壓患者這幾種食物要少吃2025-01-02 13:45:20

朝鮮新型戰(zhàn)艦疑似曝光 加強軍事現(xiàn)代化進程
朝鮮新型戰(zhàn)艦疑似曝光2025-01-02 13:32:23

媒體:中國軍用5G可連接萬個機器人 改變現(xiàn)代戰(zhàn)爭模式
中國軍用5G可連接萬個機器人2025-01-02 13:22:38

韓國民眾獻花哀悼墜機遇難者 白菊寄哀思
韓國民眾獻花哀悼墜機遇難者2025-01-02 13:25:18
海灣杯出局一地雞毛,,沙特主帥被質(zhì)疑不如曼奇尼
海灣杯出局一地雞毛2025-01-02 13:47:56

突發(fā),!韓國執(zhí)政黨總部遭遇炸彈威脅 警方緊急搜查未發(fā)現(xiàn)爆炸物
韓國執(zhí)政黨總部遭遇炸彈威脅2025-01-02 13:38:17

新興市場貨幣遭遇不同程度拋售潮 新一輪貶值潮來襲
新興市場貨幣遭遇不同程度拋售潮2025-01-02 13:41:12

俄對基輔中心發(fā)動罕見空襲 瞄準烏總統(tǒng)府區(qū)域
俄發(fā)動空襲,罕見瞄準烏總統(tǒng)府區(qū)域2025-01-02 13:27:48

韓國務安機場扣押搜查!又叫曬辣椒機場,? 新航線首航悲劇引發(fā)調(diào)查
韓國務安機場扣押搜查,又叫曬辣椒機場2025-01-02 13:29:36

滑翔傘墜落女大學生及駕駛員身亡,!
滑翔傘墜落女大學生及駕駛員身亡2025-01-02 13:36:22
珍愛網(wǎng)被罰170萬重罰還當重管 治理需出重拳
珍愛網(wǎng)被罰170萬重罰還當重管2025-01-02 13:38:38

衡陽一滑翔傘墜落 游客和教練身亡 兩人遺體已被運走
衡陽一滑翔傘墜落游客和教練身亡2025-01-02 13:39:02
彈性退休辦法來了 可自愿提前或延遲退休
彈性退休辦法來了2025-01-02 13:41:32

馬斯克、扎克伯格,、黃仁勛等科技大佬領銜 全球500富豪身家合計破10萬億美元
全球500富豪身家合計破10萬億美元2025-01-02 13:22:21

小S曬了全家福 姐妹團聚歡樂多
小S曬了全家福2025-01-02 13:34:11
新年首日遭遇恐襲事件,,拜登發(fā)聲:兇手在美國陸軍服役多年,受ISIS啟發(fā)
新年首日遭遇恐襲事件,,拜登發(fā)聲:兇手在美國陸軍服役多年,,受ISIS啟發(fā)2025-01-02 13:45:57
相關新聞
馬斯克機器人被指抄襲 《機械公敵》導演質(zhì)疑
2024-10-15 15:39:52馬斯克機器人被指抄襲馬斯克:Optimus人形機器人可以照顧孩子
2024-10-11 13:55:37特斯拉 科幻卡德羅夫展示馬斯克所送賽博戰(zhàn)車 邀約馬斯克訪車臣
2024-08-18 11:28:45卡德羅夫展示馬斯克所送賽博戰(zhàn)車機器人帶著機器狗乘空軌 科技展示未來方向
2024-11-18 09:26:35機器人帶著機器狗乘空軌馬斯克稱正改進Optimus機器人設計 將大規(guī)模生產(chǎn)
據(jù)報道,,馬斯克透露,,特斯拉正在改進Optimus機器人的設計,以解決生產(chǎn)過程中的關鍵瓶頸問題。
2024-11-11 11:13:56馬斯克稱正改進Optimus機器人設計馬斯克現(xiàn)場介紹“擎天柱”機器人 未來生活伙伴誕生
2024-10-11 23:33:00馬斯克現(xiàn)場介紹“擎天柱”機器人








