2025年人工智能三大關(guān)注點(diǎn) 構(gòu)建準(zhǔn)確世界模型(3)
當(dāng)然,具身智能目前也面臨著尚待突破的難題,。一方面,,具身智能要通過與現(xiàn)實(shí)環(huán)境的互動來獲取智能,,但即使一個理論上能夠完美感知周遭世界并進(jìn)行無監(jiān)督學(xué)習(xí)的具身智能,,也面臨著學(xué)習(xí)效率受環(huán)境制約的問題,,對于當(dāng)前零樣本學(xué)習(xí)能力尚不完備的具身智能來說,,這將大大限制其發(fā)展速度,。另一方面,以仿真環(huán)境為依托的具身智能雖然能夠藉由計(jì)算機(jī)仿真出的環(huán)境來進(jìn)行非實(shí)時的高速訓(xùn)練,,但面臨著仿真環(huán)境無法完全“還原”現(xiàn)實(shí)世界的問題,,導(dǎo)致該智能體難以在現(xiàn)實(shí)環(huán)境中實(shí)用化,也難以在短時間內(nèi)積累出如同大模型訓(xùn)練語料庫那樣的大規(guī)模數(shù)據(jù)集,。如何解決上述難題,,將是具身智能未來發(fā)展的關(guān)鍵。
2024年3月,,谷歌云前人工智能主管李飛飛創(chuàng)建了一家名為“世界實(shí)驗(yàn)室”的初創(chuàng)公司,,主要從事開發(fā)一種能夠理解三維物理世界的AI模型,被稱為“大世界模型”。其基本用法是,,給定任意圖片或文字,,AI能夠從中提取物體,進(jìn)而還原出一個完整的三維空間,。例如,,如果把文學(xué)作品輸入該模型,用戶們就可以進(jìn)入J.K.羅琳在《哈利·波特》中描繪的對角巷,,或者劉慈欣描述的三日凌空的《三體》世界,;把畫作輸入該模型,你可以坐進(jìn)梵高的《夜晚露天咖啡座》,,或者站在霍普的《夜游者》酒吧門口,,如同一個等待進(jìn)入的顧客。
與此前廣泛應(yīng)用于數(shù)字媒體制作的“2D轉(zhuǎn)3D”工具不同,,使用“大世界模型”,,用戶不僅能夠在該空間內(nèi)水平移動,還可以進(jìn)行縱深移動和視角轉(zhuǎn)換,,從不同角度看到物體的全貌,,并且這些物體還具備真實(shí)世界里的部分物理學(xué)特征,包括受阻,、碰撞、透視關(guān)系等,。李飛飛將這種具備認(rèn)識和理解空間能力的AI稱為“空間智能”,。
對于一個成立不久的公司,以上還只是早期的演示內(nèi)容,,但僅僅依靠這樣的演示內(nèi)容,,該公司便已拿到了2.3億美元的風(fēng)險(xiǎn)投資,四個月后估值就超過了10億美元,?!按笫澜缒P汀敝砸l(fā)關(guān)注,在于其直接面對了當(dāng)前人工智能的一個關(guān)鍵難點(diǎn):如何令A(yù)I認(rèn)識和理解世界,?其與Sora等圖文生視頻類AI最大的不同點(diǎn),,也在于此。體驗(yàn)過此類AI應(yīng)用的人或多或少都遇到過這樣的情況:人工智能生成的內(nèi)容完全不符合現(xiàn)實(shí)生活中的經(jīng)驗(yàn),,其結(jié)果或是令人啼笑皆非,,或是干脆成了“恐怖片”。這便是人工智能沒有認(rèn)識和理解世界的結(jié)果,,其所做的僅僅是預(yù)測每個像素點(diǎn)的數(shù)值,。
當(dāng)前,智能體研究的兩大領(lǐng)域——強(qiáng)化學(xué)習(xí)與機(jī)器人——都在關(guān)注如何形成一個足夠準(zhǔn)確的“世界模型”,。這也是楊·勒丘恩等人工智能領(lǐng)域泰斗級學(xué)者都在反復(fù)強(qiáng)調(diào)的,,只有解決了構(gòu)建世界模型的問題,,才能真正突破人工智能的訓(xùn)練瓶頸。屆時,,人工智能能夠利用世界模型中的狀態(tài)表征和動作表征數(shù)據(jù)進(jìn)行反復(fù)試錯,,進(jìn)而找到現(xiàn)實(shí)世界問題的解決方案。盡管當(dāng)前距離這一目標(biāo)還比較遙遠(yuǎn),,但李飛飛的“大世界模型”或許可以看作朝向這一人工智能解決方案邁出了一小步,。

美國黑鷹撞客機(jī)事件暴露出哪些問題 航空安全管理漏洞

大S遺囑內(nèi)容曝光!原來去年就已經(jīng)寫好了 遺產(chǎn)全留子女和母親

楊穎新劇一集結(jié)了五次婚 引發(fā)熱議與失望

《哪吒2》預(yù)測總票房72億 春節(jié)檔最大功臣
特朗普稱將加沙巴勒斯坦人遷至他國 計(jì)劃重新開發(fā)該地區(qū)

大麥被罰沒73萬元 因演出活動違規(guī)

美國國際開發(fā)署混亂繼續(xù) 魯比奧任代理署長
楊穎新劇一集結(jié)了五次婚 引發(fā)熱議與失望

特朗普政府將阿波羅飛船帶回的月巖樣本從白宮移走 飾品替換引發(fā)猜測

湖北造人形機(jī)器人“大壯”亮相 科技秀引關(guān)注

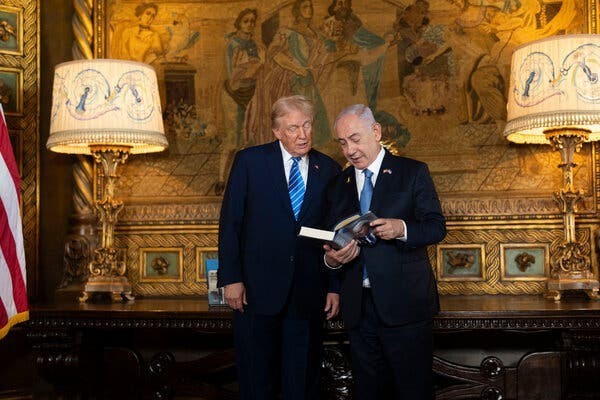
特朗普與內(nèi)塔尼亞胡會談 建議永久性重新安置加沙巴勒斯坦人 討論加沙?;鸬葐栴}

美國土安全部:特朗普上任后已逮捕或驅(qū)逐超1.4萬人 兩周內(nèi)平均每天約626人被逮捕
美國黑鷹撞客機(jī)事件暴露出哪些問題 航空安全管理漏洞

美股三大指數(shù)全線收高 科技股領(lǐng)漲大盤

臺灣律師稱汪小菲遺產(chǎn)分配占優(yōu)勢 法律規(guī)定引發(fā)討論

被石磯娘娘mini版萌化了 反差萌圈粉無數(shù)

特朗普邀請莫迪下周訪問白宮 討論貿(mào)易與移民問題

俄烏在庫爾斯克繼續(xù)展開激烈交鋒 烏軍損失慘重

特朗普簽對伊朗施壓令 恢復(fù)“最大施壓”政策
舊愛周渝民連發(fā)20條動態(tài)悼念大S 粉絲行為引發(fā)熱議

春節(jié)期間昆明入境游訂單增長90% 跨境游熱度飆升

餃子導(dǎo)演成為百億票房導(dǎo)演 《哪吒》系列功不可沒

美國土安全部:特朗普上任后已逮捕或驅(qū)逐超1.4萬人

胡錫進(jìn)談中方對美部分商品加征關(guān)稅 未立即對等報(bào)復(fù)原因探析
顏丹晨:大年初八 開工大吉 打工人迎財(cái)富挑戰(zhàn)
郭焱夸贊王楚欽冬訓(xùn)成果 技術(shù)水平躍上新臺階

特朗普:無法保證加沙?;鹉軌虺掷m(xù) 停火前景存疑
大S遺囑內(nèi)容曝光,!原來去年就已經(jīng)寫好了 遺產(chǎn)全留子女和母親

尹錫悅向首爾中央地方法院申請取消拘留 律師提出請求

南部戰(zhàn)區(qū)位黃巖島空域進(jìn)行例行巡航 堅(jiān)決捍衛(wèi)南海和平穩(wěn)定

特朗普稱將考慮派部隊(duì)進(jìn)加沙 沙特反對遷移巴勒斯坦人

監(jiān)管部門回應(yīng)乘客在飛機(jī)上撿到鞭炮 事件仍在調(diào)查中

美烏開始對賬 上千億美元被誰拿走了 援助黑洞引發(fā)爭議

女生講述在日本感染甲流經(jīng)歷 身體瘦弱更需警惕

大S汪小菲750萬財(cái)產(chǎn)官司2月27日開庭,上億遺產(chǎn)具俊曄有權(quán)分配 撫養(yǎng)權(quán)爭議再起
相關(guān)新聞
美將禁止對華半導(dǎo)體等三大領(lǐng)域投資 新規(guī)2025年生效
2024-10-29 17:07:38美將禁止對華半導(dǎo)體等三大領(lǐng)域投資2025年國資央企將在三大領(lǐng)域加大投資 推動戰(zhàn)略性新興產(chǎn)業(yè)倍增
2025-01-28 19:20:512025年國資央企將在三大領(lǐng)域加大投資重磅經(jīng)濟(jì)數(shù)據(jù)將公布 三個關(guān)注點(diǎn)提前“劇透”
2025-01-17 10:43:44重磅經(jīng)濟(jì)數(shù)據(jù)將公布蘋果公司新收費(fèi)結(jié)構(gòu)據(jù)悉面臨歐盟審查 調(diào)查問卷揭示關(guān)注點(diǎn)
2025-01-14 01:37:15蘋果公司新收費(fèi)結(jié)構(gòu)據(jù)悉面臨歐盟審查塞納河上舉行開幕式 安保成為關(guān)注點(diǎn) 7.5萬安保人員嚴(yán)陣以待
2024-07-26 14:30:33塞納河上舉行開幕式2025年春運(yùn),,開啟
2025-01-14 08:16:222025年春運(yùn)








