李飛飛團(tuán)隊造“保姆”機(jī)器人 低成本實(shí)現(xiàn)家務(wù)全能助手
李飛飛團(tuán)隊造保姆機(jī)器人,!現(xiàn)如今機(jī)器人既能跑步又能后空翻,,但何時才能真正承擔(dān)起家務(wù),,幫助人類養(yǎng)老呢,?李飛飛團(tuán)隊帶來了具身智能研究的最新成果——一個解決機(jī)器人在家庭任務(wù)中全身操作問題的綜合框架,。其核心組件的成本不到500美元,。
這個新框架名為BRS,,旨在攻克機(jī)器人執(zhí)行通用日常家庭移動操作任務(wù)這一難題,。通過一款新型雙臂移動機(jī)器人,,BRS能夠完成多種家務(wù)活動,如擰開門把手,、丟垃圾,、整理貨架、收拾客廳,、清洗馬桶等,。即使在操作過程中出現(xiàn)失誤,機(jī)器人也能自我糾正,。
網(wǎng)友們認(rèn)為這標(biāo)志著向?qū)崿F(xiàn)可通用的家庭機(jī)器人邁進(jìn)了一大步,。李飛飛團(tuán)隊的核心目標(biāo)是提升三項(xiàng)關(guān)鍵的全身控制能力:兩只機(jī)械手臂之間的協(xié)同配合,、穩(wěn)定精確的導(dǎo)航以及廣泛的末端執(zhí)行器操作范圍。為了實(shí)現(xiàn)這些功能,,團(tuán)隊選擇了Galaxea R1機(jī)器人作為硬件平臺,,該機(jī)器人具備兩個6自由度的手臂、4自由度的軀干和全向移動底座,。
然而,,復(fù)雜的機(jī)器人設(shè)計給策略學(xué)習(xí)方法帶來挑戰(zhàn),特別是在數(shù)據(jù)采集和全身協(xié)作方面,。為此,,BRS提出了兩項(xiàng)關(guān)鍵創(chuàng)新:一種低成本全身遙操作接口JoyLo和新的學(xué)習(xí)算法WB-VIMA。JoyLo利用基于操縱木偶的方法和任天堂Joy-Con控制器,,實(shí)現(xiàn)了高效的全身控制,,并提供了豐富的用戶反饋,優(yōu)化了策略學(xué)習(xí)數(shù)據(jù)質(zhì)量,。在總成本不超過500美元的情況下,,JoyLo在R1機(jī)器人上表現(xiàn)出色,包括高效的全身協(xié)調(diào)控制系統(tǒng),、直觀的遠(yuǎn)程操作體驗(yàn)和高質(zhì)量的示范動作,。
WB-VIMA學(xué)習(xí)算法則利用機(jī)器人的固有運(yùn)動學(xué)層次結(jié)構(gòu)來建模全身動作。通過自回歸全身動作去噪和多模態(tài)觀察注意力機(jī)制,,WB-VIMA能有效學(xué)習(xí)協(xié)調(diào)的全身動作,。此外,它解決了人形機(jī)器人中因微小錯誤導(dǎo)致末端執(zhí)行器顯著放大的問題,,通過分析上游組件的動作狀態(tài)和位置信息,,推算下游組件的動作,從而實(shí)現(xiàn)整體協(xié)調(diào),。
研究團(tuán)隊評估了BRS在五個代表性家庭任務(wù)上的表現(xiàn),,包括清潔房屋、清潔廁所,、倒垃圾,、放置物品到架子上和晾曬衣服。結(jié)果表明,,BRS能成功完成這些任務(wù),。同時,實(shí)驗(yàn)驗(yàn)證了JoyLo和WB-VIMA的有效性,。JoyLo在數(shù)據(jù)收集效率,、策略學(xué)習(xí)適用性和用戶體驗(yàn)方面表現(xiàn)出色,而WB-VIMA在性能上優(yōu)于基線方法,。所有參與者都認(rèn)為JoyLo是最友好的界面,,且WB-VIMA在任務(wù)中的成功率更高,,出錯幾率更小。關(guān)于BRS框架的所有工作已全部開源,,感興趣的人可以進(jìn)一步了解,。

特朗普“二級關(guān)稅”武器將引啥后果 意圖切斷委內(nèi)瑞拉石油命脈

宋佳聶遠(yuǎn)擬獲評二級演員 職稱評審結(jié)果公示
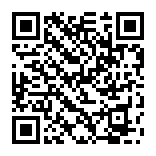
中國新型激光武器曝光 能“燒”毀無人機(jī)

丈夫?yàn)樘颖芷拮油低底∵M(jìn)鄰居家 偷住鄰居家十日被發(fā)現(xiàn)

特朗普第二任期對菲政策有何變化,美菲關(guān)系將迎戰(zhàn)略調(diào)整

只聽見啪的一聲響,,200斤黑色巨獸飛出擂臺外

山東入室搶嬰案受害者家屬發(fā)聲 要求嚴(yán)懲人販子并賠償損失
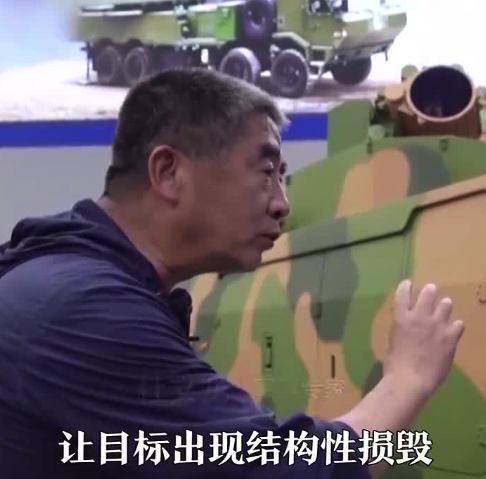
伊朗各地導(dǎo)彈已裝入發(fā)射器 以防美國升級行動

韓國政府能成功扳倒文在寅嗎 政治迫害引發(fā)爭議

哈梅內(nèi)伊:伊朗拒絕與美國直接談判,間接談判仍開放

女童在游樂園玩耍頭皮被撕裂 安全隱患引關(guān)注

唐國強(qiáng)夫婦到長春與“雪餅猴”互動

為什么美對掌控巴拿馬運(yùn)河耿耿于懷 戰(zhàn)略與政治的博弈

細(xì)數(shù)萬斯訪格陵蘭島的尷尬場面 美方遭“嚴(yán)寒般”冷遇

曝普京內(nèi)部講話稱愿打“百年戰(zhàn)爭” 等待烏克蘭崩潰

歐洲明顯成為俄烏沖突中的凈損失方

王新偉當(dāng)選遼寧省省長 履歷豐富經(jīng)驗(yàn)足

童瑤新劇《有你的時光里》堅持單身氣暈父親

35箱840件舊和服進(jìn)境被查獲 屬禁止進(jìn)口洋垃圾

緬甸震區(qū)或面臨疫病威脅 防疫挑戰(zhàn)嚴(yán)峻

釣魚佬釣起一米長大魚綁車尾 當(dāng)事人:回家魚干了

美的回應(yīng)徹底清倉小米 “正常投資操作”
中國新型激光武器曝光 能“燒”毀無人機(jī)
特朗普“二級關(guān)稅”武器將引啥后果 意圖切斷委內(nèi)瑞拉石油命脈

媒體:歐洲民營火箭入場券不好拿 首飛失利引發(fā)關(guān)注
宋佳聶遠(yuǎn)擬獲評二級演員 職稱評審結(jié)果公示

中方駁斥美防長訪日“中國威脅”論 挑動對立遭警告

美軍為何調(diào)用雙航母戰(zhàn)斗群打擊胡塞 意圖何在,?
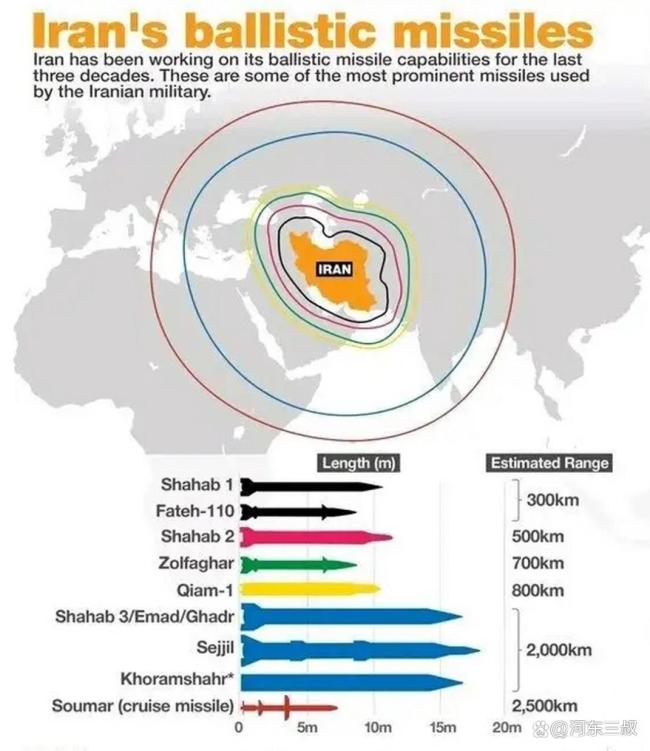
尼格買提坐高鐵被吵醒沒忍住說了句:能小聲點(diǎn)嗎,?孩子在睡覺

歐洲民營火箭入場券不好拿,首次起飛即失控

五角大樓機(jī)密文件將涉臺列優(yōu)先事項(xiàng) 引發(fā)島內(nèi)廣泛關(guān)注
中國人在緬甸廢墟所救孕婦會說中文 被困超60小時獲救

李鎮(zhèn)浩將無法播出金賽綸的項(xiàng)目,,3個月內(nèi)禁止發(fā)片

比爾蓋茨稱10年內(nèi)AI將影響兩大職業(yè) 教育醫(yī)療面臨變革

日本再發(fā)南海海槽特大地震風(fēng)險評估 或致近30萬人死亡
相關(guān)新聞
李飛飛團(tuán)隊50美元復(fù)刻DeepSeek真相 基于Qwen微調(diào)而成
2025-02-07 07:46:12李飛飛團(tuán)隊50美元復(fù)刻DeepSeek真相阿里云回應(yīng)李飛飛團(tuán)隊訓(xùn)練AI 低成本高成效引關(guān)注
2025-02-07 08:07:52阿里云回應(yīng)李飛飛團(tuán)隊訓(xùn)練AI李飛飛團(tuán)隊用不到50美元訓(xùn)練新模型 低成本挑戰(zhàn)尖端AI
2025-02-06 20:05:36李飛飛團(tuán)隊用不到50美元訓(xùn)練新模型“合肥造”機(jī)器人更聰明了
2025-02-28 11:47:26合肥造機(jī)器人更聰明了李飛飛呼吁構(gòu)建以人為中心的AI生態(tài) 從觀察者到行動者
2025-02-25 18:11:17李飛飛呼吁構(gòu)建以人為中心的AI生態(tài)機(jī)器人保姆端著咖啡和三明治來了 未來生活新體驗(yàn)
今天早餐想吃什么,?三明治,、牛奶,再加一點(diǎn)車?yán)遄??你的機(jī)器人“保姆”會在你起床前安排好一切,。在你享用早餐時,香濃的咖啡和文件也會送到你面前
2025-03-12 14:20:18機(jī)器人保姆端著咖啡和三明治來了








