國內(nèi)首個太空采礦機器人來了 開啟星際資源探索新篇章
隨著地球資源日益枯竭,人類開始將目光投向太空,,特別是月球,、火星和近地小行星等富含礦產(chǎn)資源的地方,。太空采礦這一以往只在科幻小說和電影中出現(xiàn)的概念,,正逐漸變?yōu)楝F(xiàn)實,。

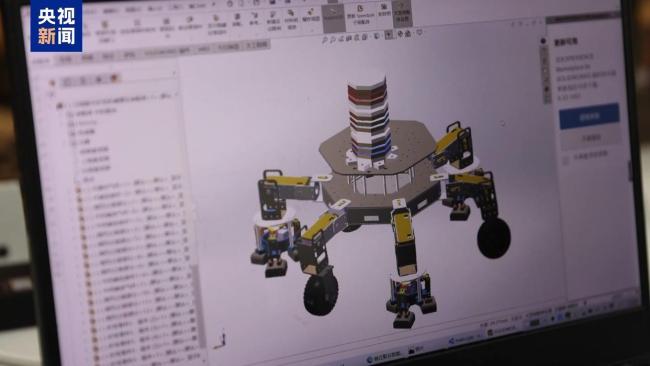
中國礦業(yè)大學(xué)劉新華教授團隊研發(fā)出國內(nèi)首臺多功能太空采礦機器人,。該機器人采用六足模式,,包括三個輪足和三個爪足,,旨在適應(yīng)太空中的微重力環(huán)境,。在地球上,機器人的重量足以支撐鉆頭鉆進,,但在月球或小行星上,,由于重力較低,如何讓鉆頭順利鉆進星體表面成為一大難題,。為此,,科研團隊設(shè)計了特殊的爪刺足,,這種結(jié)構(gòu)在微重力環(huán)境下具有更強的附著能力和抓地能力,使機器人能夠在固定位置進行采樣,,并根據(jù)地形移動,。目前,這款太空采礦機器人原型機已申請專利并通過初審,。
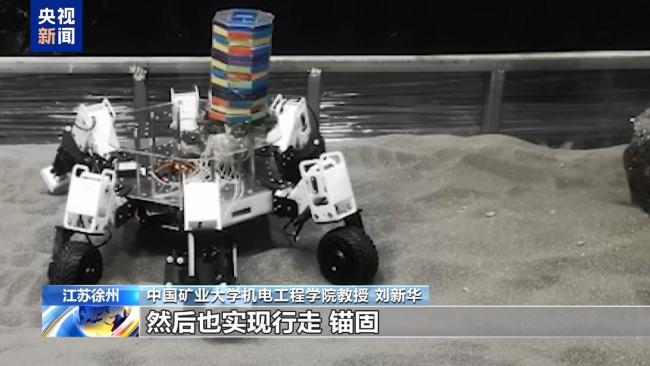
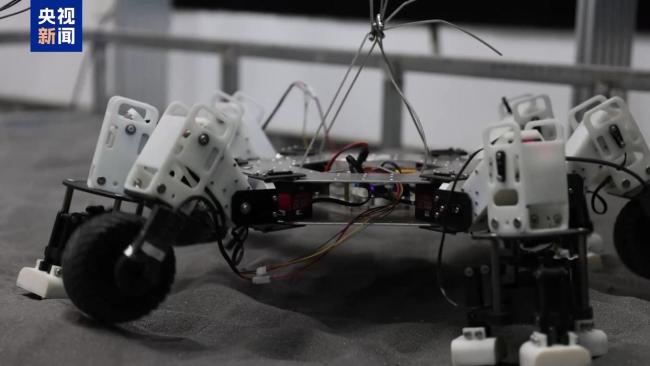
除了適應(yīng)微重力環(huán)境,,太空采礦機器人還需應(yīng)對極端溫差、真空,、太空輻射以及重量體積限制等一系列挑戰(zhàn),。劉新華教授團隊為機器人搭建了一個模擬近地小行星表面環(huán)境的“訓(xùn)練場”,通過懸吊機構(gòu)抵消重力,,實現(xiàn)微重力的變化,。經(jīng)過不斷訓(xùn)練,機器人已經(jīng)能夠調(diào)整自身結(jié)構(gòu)形狀,,適應(yīng)復(fù)雜地表環(huán)境,。此外,機器人還需要在中國礦業(yè)大學(xué)深地工程智能建造與健康運維全國重點實驗室進行更嚴格的測試,,以模擬月球表面的極端環(huán)境,,如六分之一地球重力、超高真空以及極端溫度變化,。

開發(fā)太空資源不僅代表科技競爭的新高度,,也承載著未來人類文明可持續(xù)發(fā)展的希望?;诂F(xiàn)有的空間科學(xué)技術(shù),、航空航天技術(shù)和采礦技術(shù),人類有望在未來幾十年內(nèi)實現(xiàn)對近地星體上的太空資源的試驗性開采,。月球作為地球唯一的天然衛(wèi)星,,距離較近且資源豐富,是當前全球關(guān)注度最高的目標,。月球表面的氦-3可作為核燃料,,背面水冰資源也是重要資源。此外,,太陽系中數(shù)量眾多的小行星也蘊藏著豐富的礦產(chǎn)資源,,尤其是稀土資源和金屬資源,初步估計有1500多顆近地小行星具有高開采價值,。

目前,,全球科技界在地外天體鉆孔技術(shù)、太空中原位資源利用等關(guān)鍵技術(shù)上取得了大量成果。新興技術(shù)如太空3D打印技術(shù)的發(fā)展,,進一步推動了太空采礦裝備的制造和組裝,。這些進展使得人類在太空資源的開發(fā)利用方面充滿期待。向外太空發(fā)展是人類社會未來發(fā)展的重要階段,,解決資源問題是關(guān)鍵一步,。因此,太空采礦及月球資源的原位開采利用成為研究的重點,。

屈臣氏回應(yīng)郭曉婷買發(fā)霉內(nèi)褲 事件引發(fā)廣泛關(guān)注

王楚欽打出神級一球 張本智和看傻 逆轉(zhuǎn)取勝晉級決賽

高速追尾起火 90后夫妻被困身亡 5貨車2小車過火

張思南:G7聲明未提“一中”,,想干啥呢?
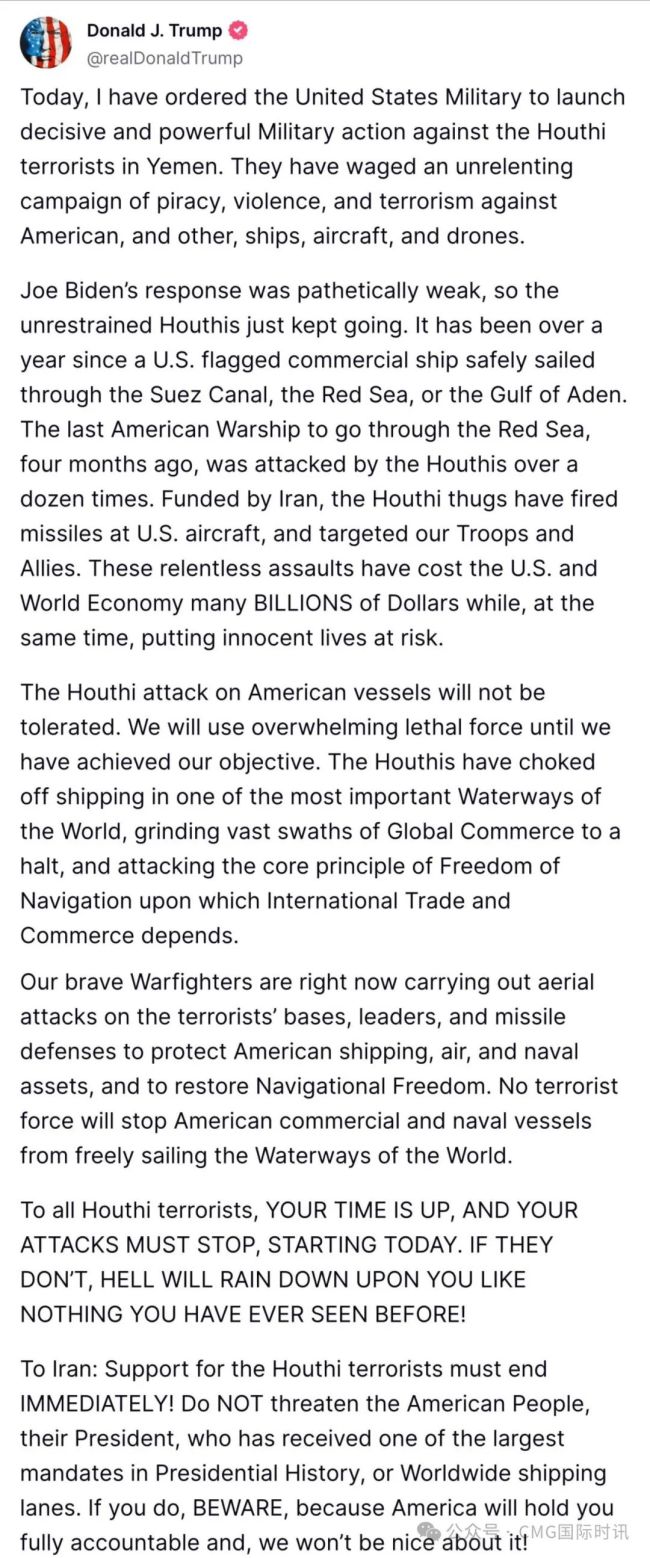
突發(fā),!美軍對胡塞武裝發(fā)動大規(guī)??找u!中東再燃戰(zhàn)火

專家談菲律賓兩大家族生死對決 政治內(nèi)斗的犧牲品

媒體:家族惡斗重創(chuàng)菲律賓 兩大家族斗爭加劇

衣服被指不雅觀 前央視女主持怒斥 遠離負能量

佛山端掉三違法窩點 涉案貨值超3000萬

馬斯克嘆氣背后:特斯拉成“雙重靶子”

星巴克被判向遭燙傷美外賣員賠5千萬 熱飲安全引爭議

藍營民代:綠營在打一個算盤 攻擊策略頻現(xiàn)

特朗普強烈要求饒他們一命 呼吁俄烏士兵獲人道對待

關(guān)鍵時間點釋放重要信號,!國臺辦主任、東部戰(zhàn)區(qū)司令員等發(fā)聲 堅定推進祖國統(tǒng)一大業(yè)

老人退休金三千在直播間月刷萬元 沉迷劇情購物陷阱
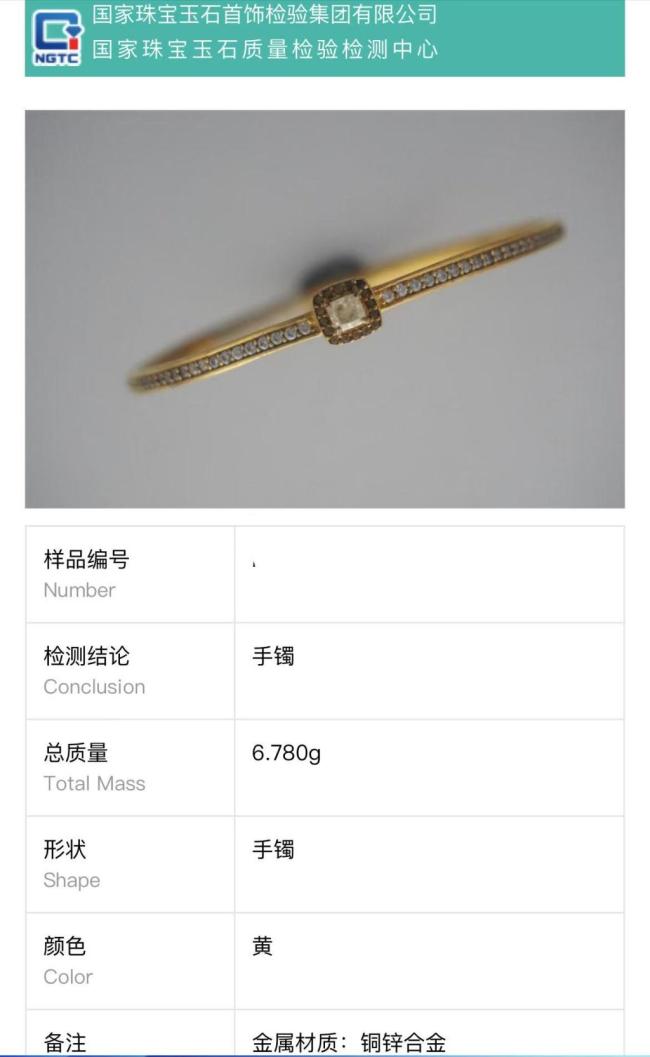
買了兩年的“黃金”生銹了 直播間套路揭秘
港澳辦發(fā)聲,,奉勸李嘉誠站對立場,!要賣港口討好美國 我們不答應(yīng)! 商業(yè)行為背后的政治考量

屈臣氏下架電商平臺同款霉斑內(nèi)褲 演員曝光引發(fā)關(guān)注

特朗普的“關(guān)稅經(jīng)濟學(xué)”錯在哪里,? 落入宿命悖論

中國“登陸駁船”令外國網(wǎng)友破防 引發(fā)海外廣泛關(guān)注
高速追尾起火 90后夫妻被困身亡 5貨車2小車過火
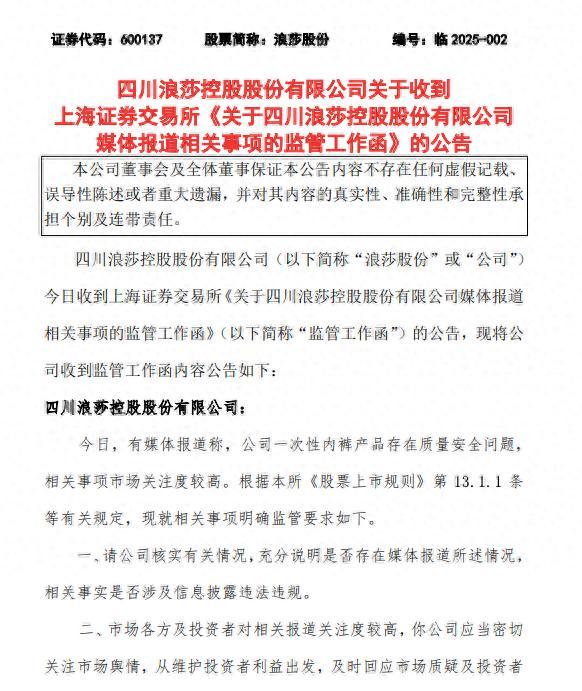
遭3·15間接點名的浪莎股份發(fā)布公告 回應(yīng)滅菌標簽造假質(zhì)疑

美宇航員滯留太空9個月終盼來飛船 特殊使命完成輪換

王楚欽看孫穎莎王藝迪比賽 頂尖對決膠著激烈

李嘉誠出售43個國際港口引發(fā)市場熱議 政治壓力下的商業(yè)抉擇

日本一黨黨首在東京街頭遭人持刀砍傷 演講中遇襲

購買一次性內(nèi)褲認準4點 安全衛(wèi)生首選

歐盟要推動與美國“防務(wù)脫鉤” 扶持本土軍工

張本智和場下和田勢教練抱頭哭泣 師徒情深共謝幕

特朗普突然下令開戰(zhàn) 對胡塞武裝發(fā)動空襲

媒體人:美國政治火山爆發(fā) 權(quán)力結(jié)構(gòu)隱性重構(gòu)
屈臣氏回應(yīng)郭曉婷買發(fā)霉內(nèi)褲 事件引發(fā)廣泛關(guān)注
王楚欽打出神級一球 張本智和看傻 逆轉(zhuǎn)取勝晉級決賽

特朗普親手將馬斯克兒子抱上總統(tǒng)專機 引發(fā)公眾質(zhì)疑

澤連斯基要求歐洲向烏派“特遣隊” 尋求西方明確支持
相關(guān)新聞
人形機器人來了,,它能做什么?
在這個科技與想象交織的時代,,我們正邁向全新階段——機器變得越來越像我們,。曾經(jīng)只存在于科幻中的人形機器人,如今悄然走進我們的日常生活,。
2024-11-01 10:00:37人形機器人來了全國首個機器人大廚獲批上崗 煎餅機器人獲食品經(jīng)營許可
2025-02-25 23:32:49全國首個機器人大廚獲批上崗人造肌肉仿生機器人來了 最接近《西部世界》的人形機器人
2024-10-29 07:46:50人造肌肉仿生機器人來了全球首個雙足骨骼機器人誕生 科技新突破
2025-02-25 01:04:50全球首個雙足骨骼機器人誕生字節(jié)跳動發(fā)布國內(nèi)首個AI編程工具 Trae國內(nèi)版亮相
2025-03-04 08:26:49字節(jié)跳動發(fā)布國內(nèi)首個AI編程工具國內(nèi)首個光子AI智能引擎在南京誕生
2025-03-03 10:11:05國內(nèi)首個光子AI智能引擎在南京誕生