張仲麟:智駕宣傳不能再含糊其辭了 駕駛員需認(rèn)清責(zé)任(2)
日常駕駛中,許多用戶體驗(yàn)到的智能駕駛功能表現(xiàn)出色,,系統(tǒng)在大部分常規(guī)場(chǎng)景下運(yùn)行穩(wěn)定,,帶來了便利和舒適。而在各類智能駕駛相關(guān)的短視頻中,,智能駕駛的各種驚艷表現(xiàn)進(jìn)一步加強(qiáng)了普通消費(fèi)者的這一認(rèn)知,,認(rèn)為智能駕駛已經(jīng)實(shí)際達(dá)到L3水平,但由于法律法規(guī)原因只能“屈尊”自稱L2輔助,。
但智能駕駛用戶不能只看到光鮮亮麗的部分,,還得接受與之伴生的風(fēng)險(xiǎn)。哪怕99.99%的場(chǎng)合智能駕駛表現(xiàn)優(yōu)秀,,剩下的0.01%所帶來的失誤可能給人留下終生難忘的記憶,,甚至付出慘痛的代價(jià),。
當(dāng)前智能駕駛本質(zhì)上仍是傳感器融合與算法決策的有限博弈,激光雷達(dá)在雨霧中的散射衰減,、攝像頭在逆光下的識(shí)別失焦,、毫米波雷達(dá)對(duì)靜態(tài)目標(biāo)的過濾機(jī)制,共同構(gòu)筑著機(jī)器感知的盲區(qū),。與經(jīng)驗(yàn)豐富的人類駕駛員相比,,存在不可忽視的局限性。例如,,在遇到雨雪大霧天氣時(shí),,智能駕駛系統(tǒng)所依賴的目視攝像頭與激光雷達(dá)的表現(xiàn)能力大打折扣,甚至無法使用,??v使還有毫米波雷達(dá)可以克服雨雪大霧天氣,但并不足以執(zhí)行智能駕駛?cè)蝿?wù),,只能執(zhí)行基本的AEB或避障類功能,。此外,在面對(duì)靜止物體,、異形障礙物時(shí),,仍然存在系統(tǒng)可能無法識(shí)別的概率,從而引發(fā)事故,。
因此,,智能駕駛用戶需要關(guān)注的往往不是其能力上限有多高,而是要掌握其能力下限,。了解手中汽車智能駕駛的性能包線,,才能更有效地使用。而且現(xiàn)行智能駕駛本質(zhì)都是“行駛輔助”功能,,車企在相關(guān)條款中強(qiáng)調(diào)最終責(zé)任人是駕駛員,,要做好隨時(shí)接管的準(zhǔn)備。畢竟在當(dāng)前L2+階段,,就算是智能駕駛狀態(tài)中出了事故,,責(zé)任也是駕駛員而非車企的。作為智能駕駛功能的電動(dòng)車車主,,我在日常使用智能駕駛高速領(lǐng)航功能時(shí),,保持對(duì)路況及儀表盤的監(jiān)控,確保面對(duì)突發(fā)情況或者智能駕駛沒有做出應(yīng)對(duì)時(shí),,能夠及時(shí)接管,。這時(shí)我的角色就從“駕駛者”變成了“監(jiān)督者”。

現(xiàn)在才發(fā)現(xiàn),這5類酒不能喝,,里面全是“添加劑”,,看看家里有嗎 揭秘藏在酒杯里的秘密

蘋果客服回應(yīng)鬧鐘調(diào)休不響導(dǎo)致遲到 設(shè)置需調(diào)整
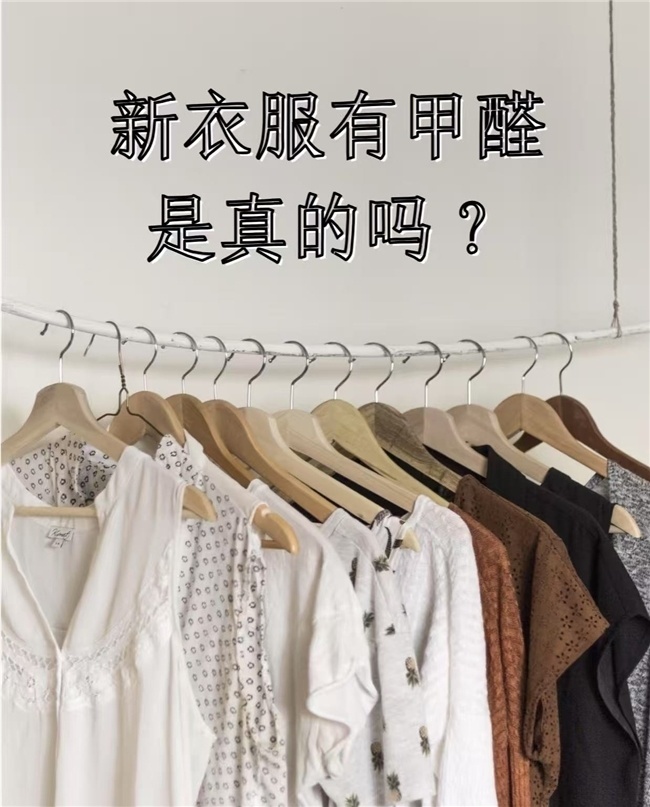
央視曝光“奪命毒衣服”,致癌物超標(biāo)20多倍

美國慫恿菲炮艇來試探中國底線嗎 馬科斯的政治豪賭
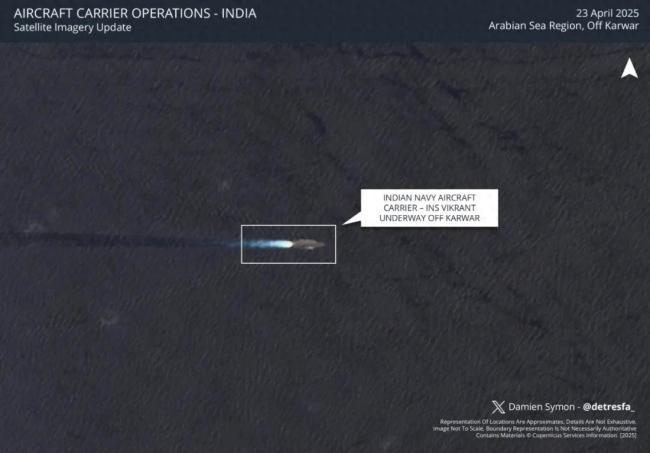
印度航母逼近巴基斯坦影響幾何 緊張局勢(shì)升級(jí)
美國芯片出口禁令阻止不了中國AI 影響微乎其微
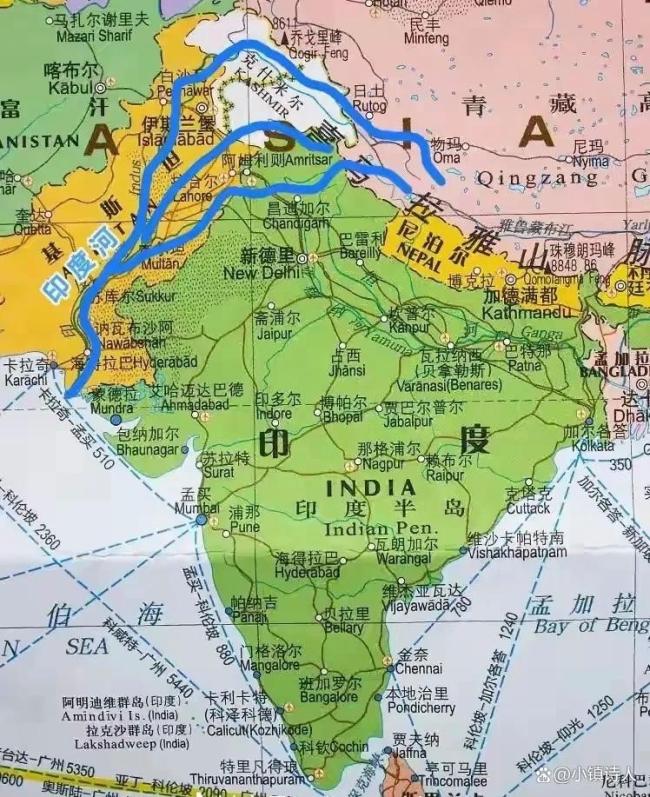
印度關(guān)閉杰納布河上游水壩

伊朗港口爆炸已致18死 油罐爆炸引發(fā)大面積破壞

騰訊又一代理游戲停運(yùn) 拳皇命運(yùn)宣布終止運(yùn)營
臺(tái)灣藍(lán)營六大咖凱道集結(jié):這場(chǎng)“抗綠”大會(huì)能戳破民進(jìn)黨恐怖氣球嗎
現(xiàn)在才發(fā)現(xiàn),,這5類酒不能喝,里面全是“添加劑”,,看看家里有嗎 揭秘藏在酒杯里的秘密

學(xué)者:烏克蘭經(jīng)濟(jì)已經(jīng)撐不住了 危機(jī)加劇社會(huì)動(dòng)蕩
蘋果客服回應(yīng)鬧鐘調(diào)休不響導(dǎo)致遲到 設(shè)置需調(diào)整

上海車展銷售火爆 車企賣力促銷

果然,,馬斯克與特朗普正在加速分道揚(yáng)鑣……價(jià)值觀沖突加劇

外國人看到武警后滿眼贊嘆!網(wǎng)友:這是獨(dú)屬于中國人的安全感

徐匯宜家煥新歸來 聚焦多元消費(fèi)需求

特朗普為何對(duì)普京突然“翻臉” 俄烏局勢(shì)失控焦慮加劇

特朗普為何謊稱中美已經(jīng)展開對(duì)話 外交部揭露真相

被圍剿的鹵味生意 三巨頭業(yè)績(jī)齊跌

俄軍解放庫爾斯克全境意味著什么 俄烏戰(zhàn)局轉(zhuǎn)折點(diǎn)

美方擔(dān)憂最新型武器被胡塞獲取 風(fēng)險(xiǎn)巨大,!

被電信詐騙了可以找銀行索賠嗎,?該如何應(yīng)對(duì)電信詐騙

哈馬斯:愿釋放所有剩余人質(zhì) 尋求五年停火協(xié)議
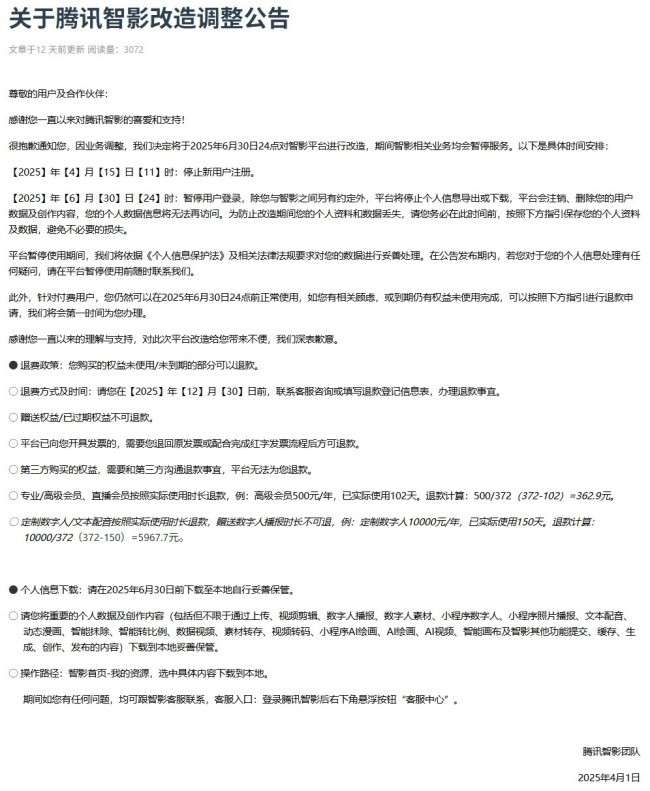
騰訊智影宣布6月30日起改造 暫停服務(wù)與用戶數(shù)據(jù)處理
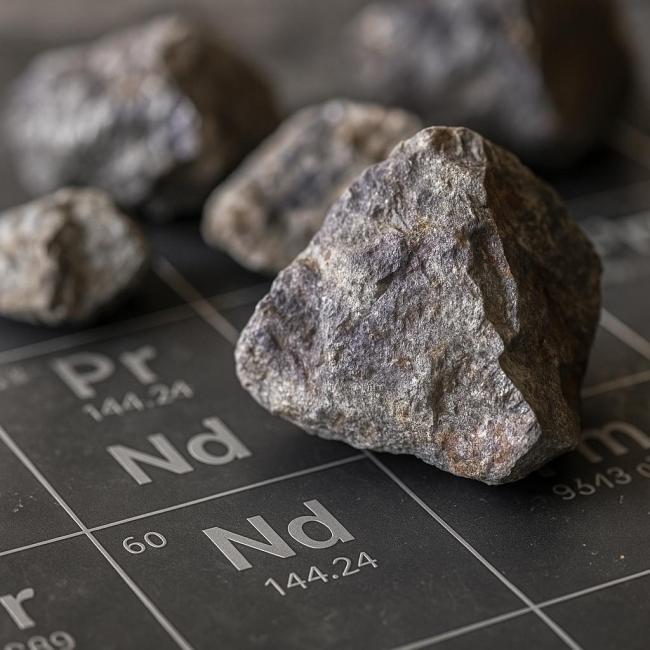
美國軍工稀土儲(chǔ)備僅夠數(shù)月 戰(zhàn)略資源告急

金價(jià)狂飆,,醫(yī)用貴金屬原料成本影響幾何?

鹵鵝哥投喂周鴻祎遭拒后首露面 生活如常繼續(xù)分享鹵鵝
舒淇為《水餃皇后》親手寫片名!

才意識(shí)到很多時(shí)候飛機(jī)沒比高鐵省時(shí),!

美方憂慮最新型武器落入胡塞手中 滑翔炸彈技術(shù)或外泄
美前高官稱不該誤判中國實(shí)力 呼吁正視現(xiàn)實(shí)

大阪世博會(huì)四川活動(dòng)周將啟幕 璀璨巴蜀文化共創(chuàng)未來
央視曝光“奪命毒衣服”,,致癌物超標(biāo)20多倍
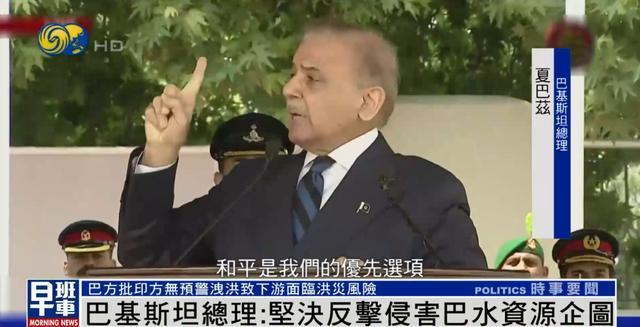
印度未事先通知突然開閘泄洪 巴方警告全力反擊
相關(guān)新聞
張鎮(zhèn)麟還上不了跑步機(jī),,無緣CBA揭幕戰(zhàn),?
2024-10-11 15:00:34張鎮(zhèn)麟還上不了跑步機(jī)張鎮(zhèn)麟接近復(fù)出 遼籃再添強(qiáng)援
2024-12-01 18:18:13張鎮(zhèn)麟接近復(fù)出張鎮(zhèn)麟今日因傷休戰(zhàn) 遼寧男籃面臨挑戰(zhàn)
2024-12-23 10:28:08張鎮(zhèn)麟今日因傷休戰(zhàn)張鎮(zhèn)麟復(fù)出 遼籃首次完整體出戰(zhàn)
2025-03-05 21:05:25張鎮(zhèn)麟復(fù)出張鎮(zhèn)麟10投3中拿到7分 表現(xiàn)不佳影響戰(zhàn)局
2025-04-26 23:48:40張鎮(zhèn)麟10投3中拿到7分CBA常規(guī)賽第37輪最佳陣容出爐 張鎮(zhèn)麟?yún)乔邦I(lǐng)銜
2025-03-09 12:20:59CBA常規(guī)賽第37輪最佳陣容出爐