全球發(fā)布!哈工大打造機器人領域頂級國際期刊 匯聚全球頂尖學術資源(2)
聚焦“生物集成微型機器人”,,文章提出生物集成微型機器人(BIMs)的技術路線圖,,闡述生物友好材料、細胞-材料雜化等設計理念,,比較不同制造工藝和驅動方式,,分析BIMs在微創(chuàng)手術、靶向給藥等醫(yī)療場景的功能實現(xiàn)機制,,為智能醫(yī)療機器人的研發(fā)提供思路,。
聚焦“并聯(lián)機器人性能理論”,文章開創(chuàng)性地搭建并聯(lián)機器人運動與力交互性能理論框架,,指出并聯(lián)機構與串聯(lián)機構的差異,,梳理研究范式,,提出涵蓋研究策略、評估方法和性能指標的評價體系,,為并聯(lián)機構在精密工程和重載領域的應用筑牢理論根基,。
聚焦“機器人輔助血管栓塞技術”,文章提出機器人輔助栓塞技術的系統(tǒng)分類方法,,評估各類栓塞劑和輸送設備的特點,,分析材料兼容性、操作精度等挑戰(zhàn),,預測智能化,、精準化的發(fā)展趨勢,為介入放射學的技術革新提供參考,。
聚焦“人形機器人技術圖譜”,,文章構建人形機器人技術知識體系,從歷史發(fā)展角度剖析人形機器人頭部和身體設計的技術突破,,評估運動控制,、環(huán)境感知等核心技術的現(xiàn)狀,強調技術模塊間的協(xié)同創(chuàng)新,,為人形機器人的未來發(fā)展指明方向,。
聚焦“柔性人工肌肉”,文章對TAMs在軟體機器人領域的最新成果進行全面梳理,,闡述TAMs在能量密度,、負載能力等方面的優(yōu)勢,分析不同材料體系和驅動方法,,將TAMs結構進行分類,,展望其在操控、傳感等領域的應用前景,。

OpenAI重組折中方案浮出水面 平衡盈利與公益

張靚穎劉宇寧《九萬字》好going人,,每一個音符都仿佛在訴說著千年的故事

張本美和:世乒賽目標是三枚金牌 自信迎接挑戰(zhàn)

李小冉說躺著就把肥減了!李小冉迎來49歲生日,,何炅謝娜為李小冉慶生

中國儀仗隊亮相莫斯科紅場 展現(xiàn)中國軍人風采
邱毅:國民黨應該“倒賴”對抗賴清德

特朗普為何主動想與中國談判 關稅危機下的“和解信號”

優(yōu)酷紀錄片2025片單 古裝懸疑劇集引期待

普京:贊揚英勇的中國人民,!

軍事專家分析印巴交火范圍會否擴散 局勢升級風險評估

中國儀仗隊紅場閱兵現(xiàn)場畫面 震撼全場的中國風采

《喀秋莎》響起!俄女兵亮相紅場:短裙軍裝 英姿颯爽

認干媽送燕窩 詐騙集團溫情攻勢騙走6000多萬

巴基斯坦卡拉奇發(fā)生爆炸 當?shù)孛襟w報告

加州州長硬剛特朗普:他沒有單方面征收關稅的權力! 紐森堅定反對關稅政策

俄羅斯圣彼得堡舉行獻花儀式 紀念衛(wèi)國戰(zhàn)爭勝利80周年

閱兵前 解放軍儀仗隊紅場唱響《游擊隊之歌》 跨越時空的精神共鳴

印改用無人機群襲巴 中國導彈再立功 殲-10CE顯神威
思路打開:用找“飯搭子”的方式相親

紅場閱兵式上烏拉震天響 迷你版搶鏡

拉菲尼亞稱夢想成真穿巴薩球衣,,提及金球獎候選 對未來充滿信心

中國軍人和俄羅斯少年合唱喀秋莎 跨越國界的友誼之歌

巴鐵亮出中國反無人機王牌武器“寂靜狩獵者”激光系統(tǒng) 25:0完勝戰(zhàn)績
OpenAI重組折中方案浮出水面 平衡盈利與公益

巴基斯坦總理談空戰(zhàn)細節(jié) 巴軍迫使印戰(zhàn)機撤退

恒安集團招聘電商客服每月6天休息 客服事件引發(fā)熱議

學者:小馬科斯躲不過被清算的結局 菲律賓政壇大戲上演
張靚穎劉宇寧《九萬字》好going人,,每一個音符都仿佛在訴說著千年的故事

外交部回應菲所謂中國軍艦高風險操作 正當合法舉措

絕地反擊 杜特爾特家族命運幾何 權力較量再起波瀾
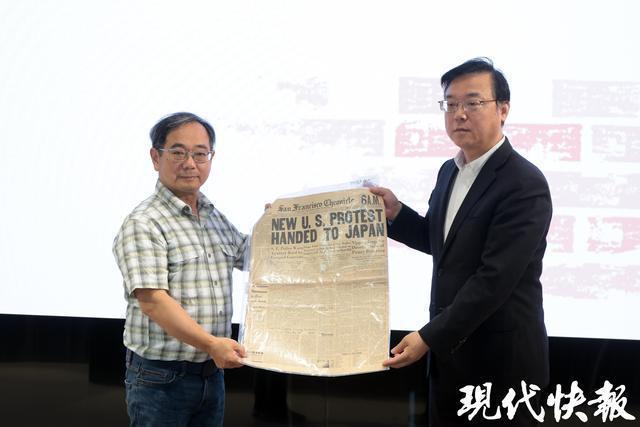
美籍華人第21年來寧捐贈史料 珍貴史料再現(xiàn)歷史真相

印軍亮出王牌巡飛彈是何用意 反擊巴基斯坦找回面子
張本美和:世乒賽目標是三枚金牌 自信迎接挑戰(zhàn)

成年人在社交時的潛臺詞 聽懂言外之意

北京移動迎來首位“雙萬兆”用戶,現(xiàn)場測速有線網絡下行速率達到9600Mbps 正式踏入雙萬兆時代
相關新聞
聯(lián)合國發(fā)布旱地全球威脅報告
上圖:2024年2月,,中國生物多樣性保護與綠色發(fā)展基金會干旱區(qū)生物多樣性調研團隊赴中亞咸海地區(qū)考察
2024-12-11 22:40:11聯(lián)合國發(fā)布旱地全球威脅報告阿里全球數(shù)學競賽獲獎名單發(fā)布 最新消息揭曉
如需轉載,,請聯(lián)系報社。未經授權,嚴禁轉載或鏡像,,違者必究,。讀者熱線:4008890008
2024-11-03 10:31:00阿里全球數(shù)學競賽獲獎名單發(fā)布《世界開放報告2024》發(fā)布 探討全球開放熱點
2024-11-06 22:43:00《世界開放報告2024》發(fā)布聯(lián)合國發(fā)布全球教育監(jiān)測報告 聚焦教育領導力
2024-11-21 15:01:47聯(lián)合國發(fā)布全球教育監(jiān)測報告2025胡潤全球富豪榜發(fā)布 馬斯克四度登頂
2025-03-27 13:31:002025胡潤全球富豪榜發(fā)布全球數(shù)據(jù)跨境流動合作倡議發(fā)布 推動數(shù)字經濟增長
2024-11-20 13:09:06全球數(shù)據(jù)跨境流動合作倡議發(fā)布








