北京車(chē)展:端到端席卷北京車(chē)展,,車(chē)企智駕差距加速擴(kuò)大

端到端席卷北京車(chē)展,,車(chē)企智駕差距加速擴(kuò)大
北京車(chē)展持續(xù)進(jìn)行,智能駕駛技術(shù)再次成為焦點(diǎn),,與前兩年的上海,、廣州車(chē)展相似,但市場(chǎng)的快速變化和技術(shù)的超速迭代超出預(yù)期,。理想汽車(chē)智能駕駛副總裁朗咸朋博士在地平線舉辦的生態(tài)圓桌論壇中提到,,智能駕駛領(lǐng)域從高速NOA、Transformer和BEV的討論迅速轉(zhuǎn)向城市NOA的普及以及無(wú)圖方案和端到端技術(shù)的探討,,顯示了短短一年間行業(yè)的巨大飛躍,。端到端席卷北京車(chē)展,車(chē)企智駕差距加速擴(kuò)大,。
當(dāng)前,,智能駕駛技術(shù)的發(fā)展重心正回歸消費(fèi)者核心需求,即更優(yōu)秀的使用體驗(yàn),、更接近人類(lèi)駕駛習(xí)慣的安全性,。行業(yè)正圍繞城區(qū)NOA功能的廣泛應(yīng)用展開(kāi)競(jìng)爭(zhēng),,關(guān)注點(diǎn)從開(kāi)城速度轉(zhuǎn)變?yōu)橛脩羧粘<せ盍浚@成為評(píng)估城區(qū)NOA實(shí)用性的關(guān)鍵指標(biāo),。然而,,盡管各大廠商積極布局,城區(qū)NOA在實(shí)際應(yīng)用中仍未達(dá)到消費(fèi)者心中的“可用”標(biāo)準(zhǔn),,激活率低,,且不時(shí)給用戶帶來(lái)負(fù)面體驗(yàn),距離廣泛接納還有很長(zhǎng)一段路,。
在追求“全國(guó)皆可用”的高階智能駕駛競(jìng)賽中,,小鵬、小米,、仰望汽車(chē)等品牌紛紛宣布各自的進(jìn)展計(jì)劃,,展現(xiàn)出行業(yè)加速推進(jìn)的態(tài)勢(shì)。然而,,技術(shù)成熟度與消費(fèi)者期望之間存在差距,,麥肯錫報(bào)告顯示,盡管對(duì)自動(dòng)駕駛功能的興趣上升,,但消費(fèi)者的付費(fèi)意愿卻下降,,尤其是一線城市更為明顯。當(dāng)前的城區(qū)NOA功能受限于場(chǎng)景應(yīng)用不足和駕駛體驗(yàn)不佳,,未能廣泛贏得用戶認(rèn)可,。
地平線在車(chē)展上分析,智駕系統(tǒng)需經(jīng)歷從“可用”到“好用”再到“愛(ài)用”的三個(gè)階段,,強(qiáng)調(diào)了從滿足物理指標(biāo)到擬人化體驗(yàn),,再到全面普及的重要性。當(dāng)前,,城區(qū)NOA面臨操作猶豫,、過(guò)度冒進(jìn)、快速擴(kuò)張導(dǎo)致系統(tǒng)不穩(wěn)定以及成本高昂等問(wèn)題,,影響了用戶體驗(yàn)和市場(chǎng)滲透,。
面對(duì)挑戰(zhàn),,技術(shù)革新被視為關(guān)鍵,。特斯拉的FSD V12版本采用端到端神經(jīng)網(wǎng)絡(luò)技術(shù),激發(fā)了國(guó)內(nèi)智駕行業(yè)對(duì)端到端解決方案的熱情,。與傳統(tǒng)模塊化架構(gòu)不同,,端到端模型通過(guò)整合感知和決策過(guò)程,簡(jiǎn)化系統(tǒng),,減少錯(cuò)誤傳遞,,更貼近人類(lèi)駕駛邏輯,,被視為提升智能駕駛“好用”程度的重要途徑。
地平線等企業(yè)已在此領(lǐng)域深耕多年,,通過(guò)算法研究和技術(shù)創(chuàng)新,,如Sparse4D、UniAD等項(xiàng)目,,推動(dòng)端到端技術(shù)的發(fā)展,。理想汽車(chē)、小鵬汽車(chē)等已開(kāi)始在自家產(chǎn)品中應(yīng)用端到端模型,,以期提升智駕系統(tǒng)的整體性能和用戶體驗(yàn),。然而,端到端模型的廣泛應(yīng)用仍面臨算法,、算力,、數(shù)據(jù)三大挑戰(zhàn),要求行業(yè)參與者不斷優(yōu)化軟硬件協(xié)同,,拓寬操作設(shè)計(jì)域(ODD),,并確保功能的高性能和無(wú)縫切換。端到端席卷北京車(chē)展,,車(chē)企智駕差距加速擴(kuò)大,。
地平線發(fā)布的SuperDrive系統(tǒng)和征程6智能駕駛計(jì)算方案,旨在通過(guò)軟硬結(jié)合的方式,,解決當(dāng)前的難題,,加速高階智能駕駛技術(shù)的規(guī)模化量產(chǎn),,推動(dòng)行業(yè)向“好用”乃至“愛(ài)用”的目標(biāo)邁進(jìn),。地平線不僅在算法層面取得突破,還提供了高性?xún)r(jià)比的硬件解決方案,,為合作伙伴提供了一條通往高階智能駕駛大規(guī)模應(yīng)用的有效路徑,。隨著技術(shù)與市場(chǎng)的不斷磨合,智能駕駛正逐步跨過(guò)從理論到實(shí)踐的門(mén)檻,,朝著更廣泛的應(yīng)用場(chǎng)景穩(wěn)步前行,。

這是今早的香港金紫荊廣場(chǎng) 慶回歸27年升旗儀式
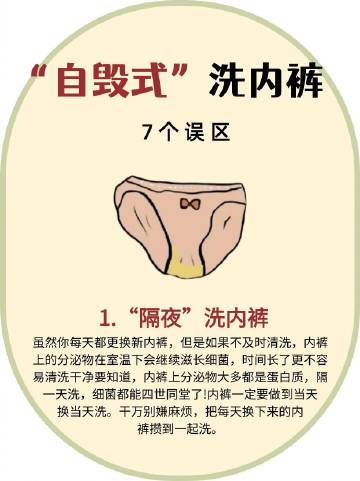
原來(lái)洗內(nèi)褲有這么多誤區(qū),7個(gè)“自毀式”洗內(nèi)褲誤區(qū)比不洗還臟
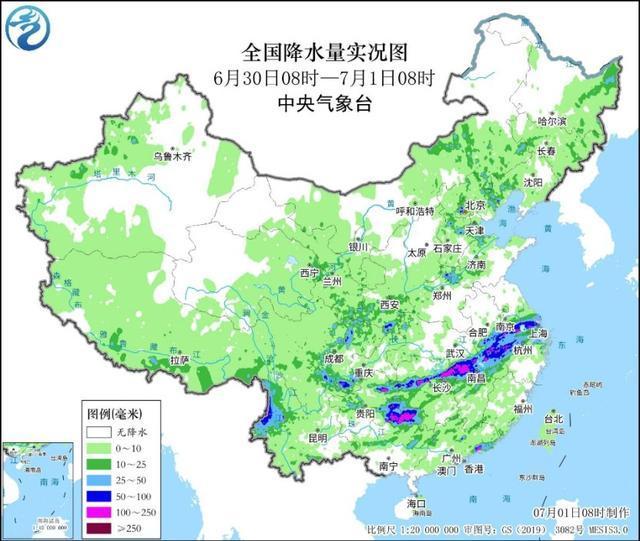
中央氣象臺(tái):南方強(qiáng)降雨持續(xù),,長(zhǎng)江中下游迎降雨間歇期
婁底某校園為明代監(jiān)獄,?造謠 散布者被行政處罰

限制北約收集情報(bào),,威脅擊落美無(wú)人機(jī),!俄軍考慮在黑海設(shè)立禁飛區(qū)

歐洲杯觀瞻:葡萄牙紙面實(shí)力優(yōu)勢(shì)明顯,,但謹(jǐn)防斯洛文尼亞爆冷

存在風(fēng)險(xiǎn)、失去信心……美國(guó)核霸權(quán)開(kāi)始動(dòng)搖了,?

美國(guó)大選,,出現(xiàn)三個(gè)重大變化

普京宣布“大消息”!西方密集關(guān)注
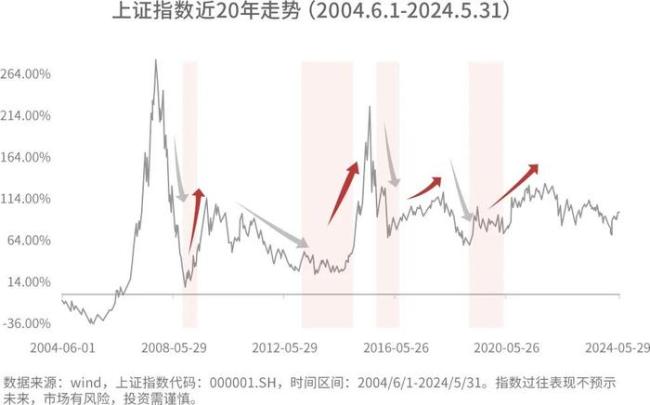
這輪震蕩市還會(huì)持續(xù)多久,? 投資者如何應(yīng)對(duì)隧道期?
原來(lái)洗內(nèi)褲有這么多誤區(qū),,7個(gè)“自毀式”洗內(nèi)褲誤區(qū)比不洗還臟

大選辯論后,拜登陷入“勸退”漩渦,!美媒刊文:“他已不是4年前的他了”

馬克龍賭輸了,,現(xiàn)在后果很?chē)?yán)重

美媒炒作:盟友不是信不過(guò)拜登,質(zhì)疑聲太多恐“便宜”了中俄
中央氣象臺(tái):南方強(qiáng)降雨持續(xù),,長(zhǎng)江中下游迎降雨間歇期
匈牙利接任歐盟輪值主席國(guó)前夕,歐爾班發(fā)文:歐盟領(lǐng)導(dǎo)層想與俄開(kāi)戰(zhàn)

破解俄羅斯“戰(zhàn)場(chǎng)神器”,,西方給出危險(xiǎn)“解藥”

美國(guó)究竟有多少核彈頭,?最新數(shù)據(jù)

記者觀察:免簽入境帶火“中國(guó)行” 外籍游客扎堆探索華夏新貌

江蘇11名省管領(lǐng)導(dǎo)干部任前公示 含正廳級(jí)干部人選

衛(wèi)星影像顯示山東艦抵菲附近海域,外媒猜測(cè)有“威懾”之意,?軍事專(zhuān)家解讀

21歲皇馬全能天才貝林厄姆 三獅軍團(tuán)未來(lái)領(lǐng)袖身體強(qiáng)悍傳射具佳 歐洲杯表現(xiàn)遭質(zhì)疑

美軍偵察船迫近中國(guó)家門(mén)口想干啥 水下監(jiān)聽(tīng)密謀曝光

首次曝光:美國(guó)提供了1.4萬(wàn)枚

多個(gè)高考生家庭被騙數(shù)百萬(wàn) 警方緊急預(yù)警

如何結(jié)束俄烏沖突,?澤連斯基最新表態(tài)

俄羅斯“生病”,美國(guó)吃藥,?

法國(guó)能承受極右翼上位之“重”嗎 政治賭局與國(guó)家未來(lái)
這是今早的香港金紫荊廣場(chǎng) 慶回歸27年升旗儀式

商業(yè)航天進(jìn)入快速發(fā)展階段 市場(chǎng)規(guī)模迅猛擴(kuò)張

法國(guó)“屏住呼吸”舉行議會(huì)選舉,!美媒:此次選舉可能“撼動(dòng)歐盟與北約”

“買(mǎi)家秀”!塞爾維亞首次公開(kāi)展示紅旗-17AE防空系統(tǒng)

范志毅說(shuō)要謹(jǐn)言慎行 國(guó)足需嚴(yán)謹(jǐn)對(duì)待18強(qiáng)賽

快船四巨頭沖冠失敗正式解體:?jiǎn)讨纬呻x隊(duì)首人 威少正被兜售

國(guó)羽小將離世 羽協(xié):目前未明確病因 賽場(chǎng)急救引爭(zhēng)議
相關(guān)新聞
北京車(chē)展,,合資車(chē)企吹響反攻號(hào)角 加速電動(dòng)智能化轉(zhuǎn)型
2024-05-04 13:11:54北京車(chē)展北京車(chē)展:轎車(chē)“神仙打架”,,MONA攜高階智駕“王牌”亮劍
2024-04-24 11:45:57北京車(chē)展:轎車(chē)“神仙打架”油電大戰(zhàn)下的北京車(chē)展:這些車(chē)企已隱退
2024-04-25 14:46:46油電大戰(zhàn)下的北京車(chē)展周鴻祎賣(mài)了邁巴赫,北京車(chē)展換了人間 自主車(chē)企異彩紛呈
2024-05-07 11:28:49周鴻祎賣(mài)了邁巴赫北京車(chē)展闊別四年后回歸 全球車(chē)企競(jìng)逐新能源浪潮
2024-04-24 22:25:49北京車(chē)展闊別四年后回歸魏牌藍(lán)山智駕版亮相北京車(chē)展 智能化角逐成焦點(diǎn)
2024-04-25 10:49:56魏牌藍(lán)山智駕版亮相北京車(chē)展








