端到端、世界模型,、車路云……誰(shuí)將成為明年“AI+交通”最熱詞,?

1942年,科幻小說(shuō)家艾薩克·阿西莫夫(Isaac Asimov)在他的短篇小說(shuō)《轉(zhuǎn)圈圈》(Runaround)中第一次明確提出了“機(jī)器人三定律”,,這一定律也被稱為“現(xiàn)代人工智能技術(shù)的基石”,。
阿西莫夫可能沒(méi)有完全預(yù)見(jiàn)到,八十年后的世界會(huì)多么接近他的科幻夢(mèng)想,。
如今,,人們生活在一個(gè)由人工智能滲透的世界里,這個(gè)世界在許多方面已超越阿西莫夫的想象,。2024年,我們見(jiàn)證了一系列人工智能技術(shù)的創(chuàng)新與涌現(xiàn),。從AI視頻生成模型Sora到GPT-4o,,一系列生成式人工智能新技術(shù)相繼問(wèn)世、更新迭代,,讓人感覺(jué)到似乎“未來(lái)已來(lái)”,。
這一年,大模型,、端到端,、世界模型、車路云等已成為交通智能化領(lǐng)域最具革命性的技術(shù)應(yīng)用,,不僅提升了駕駛體驗(yàn),,還為城市交通的安全性、效率和可持續(xù)性帶來(lái)新的可能,。
展望2025年,,隨著人工智能與交通的進(jìn)一步深度融合,,哪些技術(shù)領(lǐng)域充滿機(jī)遇?誰(shuí)將引領(lǐng)新一年的行業(yè)發(fā)展,?
BEV+OCC感知能力困局待解
對(duì)照著自動(dòng)駕駛領(lǐng)域這幾年的行業(yè)熱詞按圖索驥,,可以把握自動(dòng)駕駛算法模型的發(fā)展脈絡(luò)。在特斯拉的帶動(dòng)下,,自2021年至今,,自動(dòng)駕駛行業(yè)這幾年的動(dòng)態(tài)熱詞依次為:BEV+Transformer、OCC占用網(wǎng)絡(luò),、無(wú)圖NOA,、端到端。
BEV(鳥(niǎo)瞰圖)網(wǎng)絡(luò)通過(guò)矢量化的鳥(niǎo)瞰視角檢測(cè)白名單障礙物,,OCC通過(guò)體素化的占用網(wǎng)絡(luò)預(yù)測(cè)3D空間的占位情況,,實(shí)現(xiàn)對(duì)通用障礙物的感知,到無(wú)圖NOA的階段,,自動(dòng)駕駛算法可以通過(guò)車道網(wǎng)絡(luò)實(shí)時(shí)建圖,,構(gòu)建道路拓?fù)洹?/p>
再到今年大火的端到端,一方面,,由于消除了傳統(tǒng)分模塊方案中各種小模型的冗余,,計(jì)算資源得以集約化使用,神經(jīng)網(wǎng)絡(luò)的參數(shù)量或規(guī)模得以進(jìn)一步提升,;另一方面,,無(wú)論是分段式端到端還是一體式端到端,感知到?jīng)Q策之間的傳輸帶寬增加,,信息損失減少,,進(jìn)一步增強(qiáng)了系統(tǒng)的感知能力。

捕過(guò)中華鱘的他成護(hù)漁人 從捕魚(yú)者到守護(hù)者

年化12%理財(cái)產(chǎn)品爆雷 央視報(bào)道引發(fā)關(guān)注

中轉(zhuǎn)換乘有這3種情況 分段購(gòu)票攻略

朝鮮總理剛換人,,普京就收到一封賀信,,不到24小時(shí),中方打去電話 三國(guó)互動(dòng)引關(guān)注

波蘭總理:北約國(guó)家準(zhǔn)備因電纜事故加強(qiáng)在波羅的海的軍事存在

也門(mén)某部落向美以兩國(guó)展示武力 胡塞武裝高調(diào)示強(qiáng)

美元持續(xù)強(qiáng)勢(shì)上漲,,亞洲部分國(guó)家貨幣遭遇重創(chuàng) 多國(guó)央行考慮干預(yù)

張小斐開(kāi)大G連續(xù)違章6次,,網(wǎng)友:濾鏡碎一地,車品見(jiàn)人品 明星違章引反思
年化12%理財(cái)產(chǎn)品爆雷 央視報(bào)道引發(fā)關(guān)注

朝鮮突然被俄羅斯爆出猛料,,美西方火速調(diào)轉(zhuǎn)“槍口” 烏俄局勢(shì)再添變數(shù)

加沙人冒大雨在泥水中排隊(duì)打水

谷愛(ài)凌:我一直代表中國(guó) 首登央視分享心路

馬斯克“改名”引爆幣圈 神秘交易員賺翻天
研究發(fā)現(xiàn)調(diào)整進(jìn)食時(shí)間可以緩解疲勞 通過(guò)晝夜節(jié)律干預(yù)
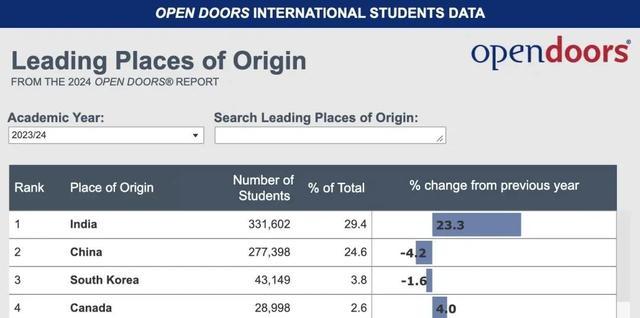
中產(chǎn)砸?guī)装偃f(wàn)留學(xué)的回報(bào),,被印度留子小成本實(shí)現(xiàn) 精準(zhǔn)規(guī)劃實(shí)現(xiàn)逆襲
樊振東MLB中國(guó)區(qū)冠軍榮耀大使 解鎖棒球新可能

馬斯克回應(yīng)拉斯維加斯爆炸案 特斯拉團(tuán)隊(duì)正調(diào)查此事

我是陸地航母準(zhǔn)備啟程 新年啟航追夢(mèng)前行
特朗普給海湖莊園起新名號(hào) 稱其為“宇宙中心”

特朗普當(dāng)眾喊話中國(guó),不到24小時(shí),,中方直接把話說(shuō)透 中美合作需相互尊重

爆款I(lǐng)P開(kāi)播,!不僅很爽,還很好笑 多類型劇集齊開(kāi)花
中轉(zhuǎn)換乘有這3種情況 分段購(gòu)票攻略

2025第一個(gè)工作日開(kāi)始了 新年新氣象

2024年房地產(chǎn)政策力度空前 穩(wěn)樓市促回穩(wěn)
搬家現(xiàn)場(chǎng)3萬(wàn)元現(xiàn)金消失 民警拼圖式破獲

洪都拉斯總統(tǒng):或要求美從本國(guó)撤軍 回應(yīng)移民驅(qū)逐威脅

多名核心員工離開(kāi)CDPR,玩家開(kāi)始擔(dān)憂《巫師4》質(zhì)量和開(kāi)發(fā)進(jìn)度 核心成員流失引熱議

俄羅斯游戲主機(jī)踏上自研之路:霧游戲電視棒,、Elbrus 芯片主機(jī)雙頭并進(jìn) 探索霧游戲新領(lǐng)域

朝鮮舉行新年大型演出金正恩攜女觀看,!

馬斯克改了X昵稱和頭像 引發(fā)粉絲猜測(cè)與幣圈波動(dòng)

美國(guó)公開(kāi)中國(guó)各類彈道導(dǎo)彈數(shù)量,打殘西太平洋美軍夠用嗎,? 導(dǎo)彈威脅引發(fā)熱議

為什么頭發(fā)越洗越油,?醫(yī)生提醒:大多數(shù)因?yàn)樗ㄗh不要頻繁洗頭

詹姆斯小兒子加盟亞利桑那大學(xué) 四星新秀啟航

工人失誤致廠房起火1000斤臘肉報(bào)廢 用電安全引警醒
捕過(guò)中華鱘的他成護(hù)漁人 從捕魚(yú)者到守護(hù)者
相關(guān)新聞
誰(shuí)將成為明年“AI 交通”最熱詞 世界模型引領(lǐng)潮流
2024-12-13 13:58:59誰(shuí)將成為明年AI交通最熱詞券商發(fā)布計(jì)算機(jī)板塊明年投資策略 全面迎接AI+大時(shí)代
2024-12-22 18:26:13券商發(fā)布計(jì)算機(jī)板塊明年投資策略誰(shuí)將成為下一個(gè)入股引望的車企?
2024-09-24 09:49:22誰(shuí)將成為下一個(gè)入股引望的車企誰(shuí)將成為新的哈馬斯領(lǐng)導(dǎo)人 潛在人選引發(fā)關(guān)注
2024-10-21 20:19:03誰(shuí)將成為新的哈馬斯領(lǐng)導(dǎo)人今年7月成為史上最熱7月 全球熱浪預(yù)警
2024-08-02 06:13:34今年7月成為史上最熱7月誰(shuí)將成為日本新首相 小泉進(jìn)次郎勝算大增
2024-09-27 07:38:50誰(shuí)將成為日本新首相








