英偉達機器人跳舞驚艷全網(wǎng) ASAP技術引領未來
機器人版的科比,、詹姆斯和C羅已經(jīng)出現(xiàn)。只見“科比”在賽場上后仰跳投,,大殺四方,?!癈羅”和“詹姆斯”也展示了各自的招牌慶祝動作。這些還只是開篇,,這款人形機器人還能完成側跳,、前跳、前踢,、右踢等高難度動作,,甚至能深蹲和腿部拉伸。更令人驚艷的是,它還會跳APT舞,。
與波士頓動力的Atlas相比,,如今的人形機器人已進化到難以想象的程度。正如Figure創(chuàng)始人所說,,人形機器人的iPhone時刻即將到來。那么,,如何讓機器人成為“機器人界的科比”呢,?
來自CMU和英偉達的研究團隊提出了ASAP模型,這是一個“real2sim2real”的框架,,能讓機器人掌握流暢且動感的全身控制動作,。ASAP包含兩個階段:預訓練和后訓練。在預訓練階段,,通過重定向的人體數(shù)據(jù),,在仿真環(huán)境中預訓練運動跟蹤策略。在后訓練階段,,將這些策略部署到現(xiàn)實世界,,并收集真實數(shù)據(jù),訓練一個delta動作模型來彌補動力學差異,。然后,,將這個delta動作模型集成到仿真器中,對預訓練策略進行微調(diào),,使其更好地匹配現(xiàn)實世界的動力學特性,。
英偉達高級研究科學家Jim Fan表示,通過強化學習,,他們成功讓人形機器人模仿了C羅,、詹姆斯和科比的動作。這些神經(jīng)網(wǎng)絡模型正在英偉達GEAR實驗室的真實硬件平臺上運行,。為了讓大家清晰觀賞每個流暢的動作細節(jié),,他們特意放慢了視頻速度。
ASAP模型采用“真實→仿真→真實”的方法,,成功實現(xiàn)了人形機器人全身控制所需的超平滑動態(tài)運動,。首先在仿真環(huán)境對機器人進行預訓練,但面臨仿真與現(xiàn)實差距的問題,。解決方案是將預訓練策略部署到實體機器人上采集數(shù)據(jù),,隨后在仿真環(huán)境中回放這些數(shù)據(jù)。通過額外神經(jīng)網(wǎng)絡學習差異參數(shù),,對傳統(tǒng)物理引擎進行“動態(tài)校準”,,使機器人能在仿真環(huán)境中獲得近乎真實的訓練體驗。

東契奇為歐文祈禱 傷病牽動人心
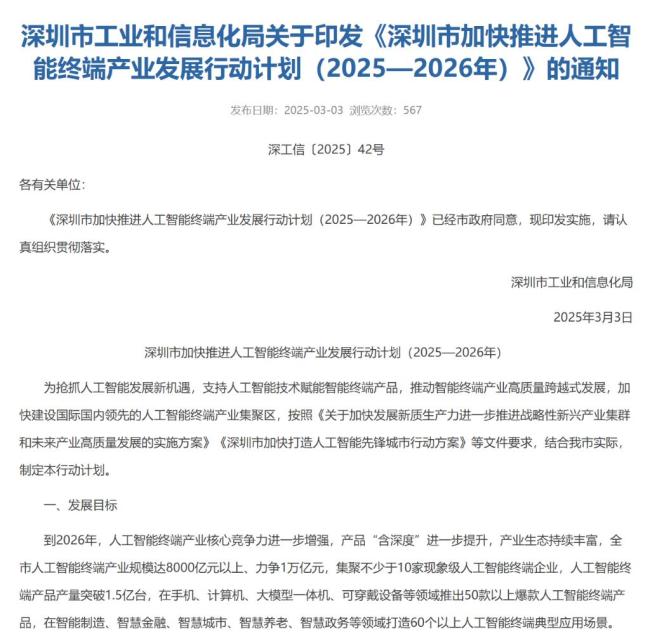
深圳連發(fā)四份重磅文件 布局AI與機器人產(chǎn)業(yè)

拜仁不再給基米希漲薪和簽字費 監(jiān)事會決定不變

埃梅里:勝利是結果不是目標 專注過程迎接挑戰(zhàn)

加元墨西哥比索跌至一個月新低 關稅風暴沖擊匯市

代表建議在全國推行春秋假 緩解假日旅游潮汐效應

羅馬主帥拉涅利被罰款2萬歐元 批評裁判遭罰

菲律賓一架FA50戰(zhàn)機夜間失聯(lián) 搜救行動進行中

反馬斯克浪潮席卷全美:政府效率部引爆社會裂痕
美政府被曝已暫停向烏克蘭輸送武器 援助凍結引發(fā)擔憂

加拿大將只能靠烏克蘭難民抵御美國擴張

默森質(zhì)疑阿森納勝埃因霍溫能力 攻擊火力成疑

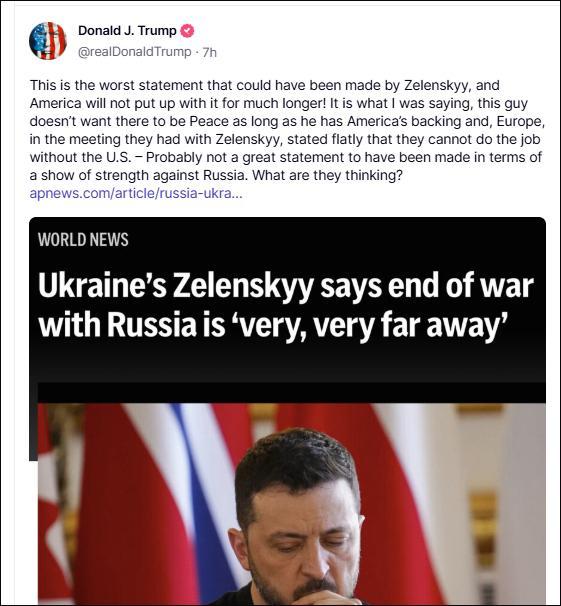
俄稱結束沖突是一個艱難的過程 俄方揭西方陣營裂痕

從小鮮肉,到苦大仇深的小老頭,,澤連斯基是這三年里老得最快的人
臺學者:解放軍實彈演習越來越近

英法支持烏克蘭能否替代美國援助 歐洲奪回和談主導權
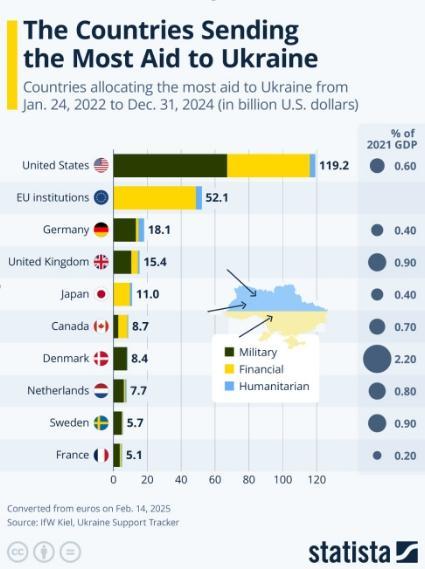
美斷供若歐洲砸錢 烏能堅持下去嗎
東契奇為歐文祈禱 傷病牽動人心

伊爾迪茲:球迷渴望勝利很正常 保持出色表現(xiàn)
深圳連發(fā)四份重磅文件 布局AI與機器人產(chǎn)業(yè)

交警暴雪疏導車輛一夜凍成“雪人” 寒潮下的堅守
拜仁不再給基米希漲薪和簽字費 監(jiān)事會決定不變

代表建議在全國推行“春秋假” 緩解假日旅游潮汐效應

庫爾德工人黨會對土耳其政府服軟嗎 厄賈蘭呼吁解散組織

《哪吒2》成香港票房最高內(nèi)地電影 連續(xù)10天登頂票房榜
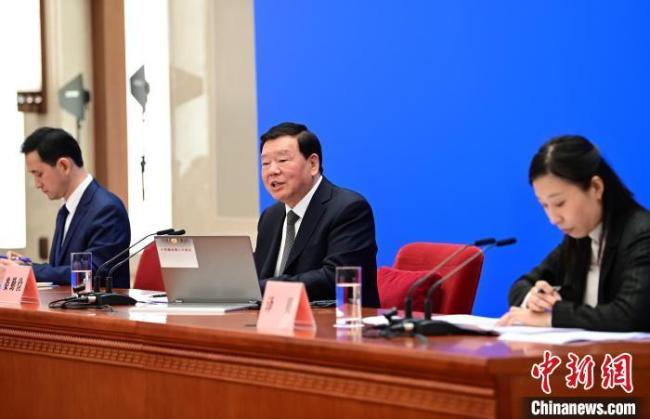
中國國防費連續(xù)9年個位數(shù)增長 占比低于世界平均水平

曝申花海港國腳亞冠淘汰賽后直飛西亞 備戰(zhàn)18強賽

建議回收動力電池緩解進口依賴 推動規(guī)范運營

誰來承擔烏克蘭安全保障 美烏礦產(chǎn)協(xié)議引爭議

英首相辦公室:對加沙援助不能受阻 呼吁持續(xù)?;?/a>
你以為胸悶只是小事?其實可能是心臟在預警,! 了解背后的大隱患

吳彥祖首公開洛杉磯新家 融合五行元素

專家:烏克蘭最大優(yōu)勢是頑強 堅韌面對挑戰(zhàn)
美“援烏資金”至少70%被留美國
祖沖之三號再次打破紀錄 超導量子計算新突破
相關新聞
英偉達的機器人軍團近半來自中國 中國玩家展現(xiàn)強勁競爭力
在本屆CES上,,英偉達發(fā)布了一系列面向AI時代的新產(chǎn)品和技術,其中NVIDIA Cosmos平臺的推出尤為引人注目
2025-01-14 11:19:40英偉達的機器人軍團近半來自中國原小鵬機器人運控負責人加入英偉達 重返前東家
原小鵬機器人運控負責人達興燁在年后離職,,加入了英偉達,。目前,小鵬這一崗位由其他人員暫代,,正在尋找合適人選
2025-02-26 15:57:02原小鵬機器人運控負責人加入英偉達英偉達,,市值重回第一
2025-01-22 09:58:19英偉達重回市值第一英偉達市值一夜蒸發(fā)1.13萬億
2024-10-16 11:35:21英偉達市值一夜蒸發(fā)1.13萬億英偉達股價創(chuàng)新高 分析師看漲助推
2024-10-22 09:29:18英偉達股價創(chuàng)新高英偉達被立案調(diào)查 涉嫌違反反壟斷法
2024-12-09 19:40:30英偉達被立案調(diào)查