李飛飛團隊造“保姆”機器人 低成本實現(xiàn)家務全能助手
李飛飛團隊造保姆機器人!現(xiàn)如今機器人既能跑步又能后空翻,,但何時才能真正承擔起家務,,幫助人類養(yǎng)老呢,?李飛飛團隊帶來了具身智能研究的最新成果——一個解決機器人在家庭任務中全身操作問題的綜合框架,。其核心組件的成本不到500美元。
這個新框架名為BRS,,旨在攻克機器人執(zhí)行通用日常家庭移動操作任務這一難題,。通過一款新型雙臂移動機器人,BRS能夠完成多種家務活動,,如擰開門把手,、丟垃圾、整理貨架,、收拾客廳,、清洗馬桶等。即使在操作過程中出現(xiàn)失誤,,機器人也能自我糾正,。

網(wǎng)友們認為這標志著向?qū)崿F(xiàn)可通用的家庭機器人邁進了一大步。李飛飛團隊的核心目標是提升三項關(guān)鍵的全身控制能力:兩只機械手臂之間的協(xié)同配合,、穩(wěn)定精確的導航以及廣泛的末端執(zhí)行器操作范圍,。為了實現(xiàn)這些功能,團隊選擇了Galaxea R1機器人作為硬件平臺,,該機器人具備兩個6自由度的手臂,、4自由度的軀干和全向移動底座。

然而,,復雜的機器人設(shè)計給策略學習方法帶來挑戰(zhàn),,特別是在數(shù)據(jù)采集和全身協(xié)作方面。為此,,BRS提出了兩項關(guān)鍵創(chuàng)新:一種低成本全身遙操作接口JoyLo和新的學習算法WB-VIMA,。JoyLo利用基于操縱木偶的方法和任天堂Joy-Con控制器,實現(xiàn)了高效的全身控制,,并提供了豐富的用戶反饋,,優(yōu)化了策略學習數(shù)據(jù)質(zhì)量。在總成本不超過500美元的情況下,,JoyLo在R1機器人上表現(xiàn)出色,,包括高效的全身協(xié)調(diào)控制系統(tǒng)、直觀的遠程操作體驗和高質(zhì)量的示范動作,。

WB-VIMA學習算法則利用機器人的固有運動學層次結(jié)構(gòu)來建模全身動作,。通過自回歸全身動作去噪和多模態(tài)觀察注意力機制,WB-VIMA能有效學習協(xié)調(diào)的全身動作,。此外,,它解決了人形機器人中因微小錯誤導致末端執(zhí)行器顯著放大的問題,,通過分析上游組件的動作狀態(tài)和位置信息,推算下游組件的動作,,從而實現(xiàn)整體協(xié)調(diào),。

研究團隊評估了BRS在五個代表性家庭任務上的表現(xiàn),包括清潔房屋,、清潔廁所,、倒垃圾、放置物品到架子上和晾曬衣服,。結(jié)果表明,,BRS能成功完成這些任務。同時,,實驗驗證了JoyLo和WB-VIMA的有效性,。JoyLo在數(shù)據(jù)收集效率、策略學習適用性和用戶體驗方面表現(xiàn)出色,,而WB-VIMA在性能上優(yōu)于基線方法,。所有參與者都認為JoyLo是最友好的界面,且WB-VIMA在任務中的成功率更高,,出錯幾率更小。關(guān)于BRS框架的所有工作已全部開源,,感興趣的人可以進一步了解,。



深圳一高中外貨車大擺龍門陣 違停亂象引擔憂

速滑世錦賽中國隊男團奪金 打破場地紀錄奪冠
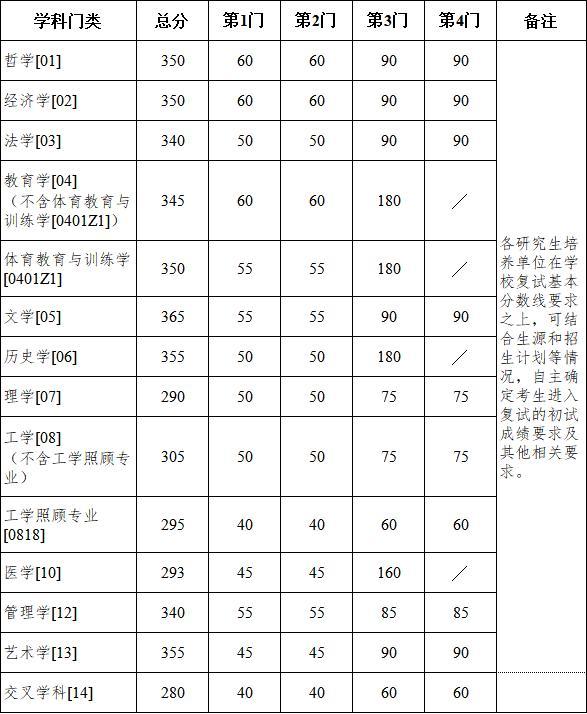
南開2025年研考分數(shù)線公布 多所高校已公開復試線
速滑世錦賽中國隊男團奪金 打破場地紀錄奪冠

專家:俄談判前要利益最大化

中國“超音速試金石”震撼曝光 創(chuàng)世界速度新標桿!
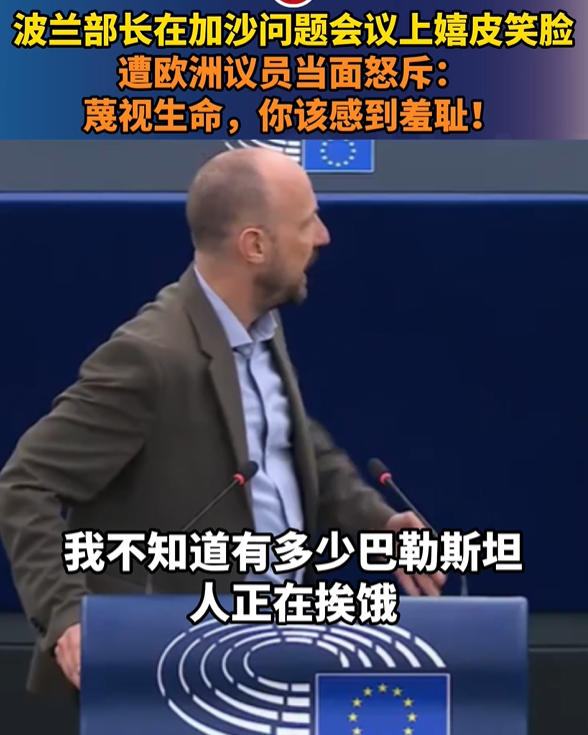
波蘭高官在加沙問題會議上嬉皮笑臉,,遭歐洲議員當面怒斥:蔑視生命,,你該感到羞恥!
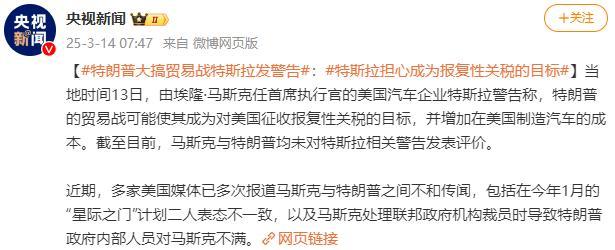
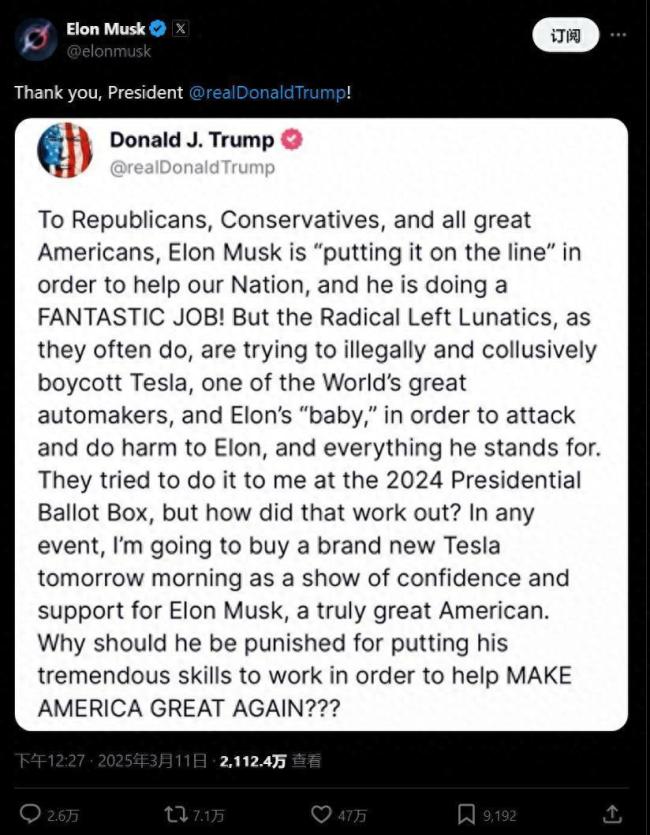
特斯拉發(fā)警告擔憂成貿(mào)易戰(zhàn)報復目標 貿(mào)易戰(zhàn)或增成本

8歲男童吃葉黃素軟糖患干眼癥 虛假宣傳引質(zhì)疑

30 老將批量落選,,沙特隊征召11名“新人” 新面孔迎戰(zhàn)國足日本
南開2025年研考分數(shù)線公布 多所高校已公開復試線

美財長:除金屬和汽車關(guān)稅 其他所有商品都可進行關(guān)稅談判 貿(mào)易談判或加速
馬斯克已“死”,!政治行動委員會拒收投資

媒體:鄭欽文正慢慢找回自己 闖勁十足回歸賽場

華為筆記本再無Windows可用 全面轉(zhuǎn)向鴻蒙PC系統(tǒng)

國臺辦正告賴清德當局玩火必自焚!

女子給蘋果手機充電時炸了 驚魂一刻引發(fā)關(guān)注

《向陽花》趙麗穎花式搞錢20萬 監(jiān)獄姐妹共戰(zhàn)命運

俄軍投下多枚3噸級重磅炸彈轟炸俄境內(nèi)烏軍:劇烈爆炸 巨型蘑菇云騰起,!

烏稱堅決反對“凍結(jié)沖突” 獲美歐支持

泰國影迷扮成哪吒敖閏看哪吒2 首映現(xiàn)場熱鬧非凡

多古:整個團隊都充滿了能量 曼聯(lián)晉級八強

普京同意?;?0天 條件與細節(jié)待議

特朗普攪局,,4萬名格陵蘭島選民“從沙發(fā)上站起來”,!選舉熱情高漲

辦卡中的這些霸王條款無效 合同陷阱需警惕
深圳一高中外貨車大擺龍門陣 違停亂象引擔憂

澤連斯基回應普京的表態(tài) 呼吁通過對俄羅斯實施制裁來向普京施壓

拉夫羅夫涉華言論傳遞什么信號 中俄關(guān)系穩(wěn)固釋放重要信號

女孩作息黑白顛倒小腿長滿紫紅色斑,聽聽中醫(yī)怎么說

肉鋪老板絞肉絞斷三根手指索賠顧客,,助人為樂發(fā)生意外誰該擔責,?

普京稱庫爾斯克烏軍不投降就被消滅 俄軍強勢收復要地

裁神馬斯克導演白宮電鋸驚魂 裁員風暴席卷美國政府

國際黃金期價創(chuàng)歷史新高 金價突破3000美元大關(guān)

專家分析歐洲計劃向烏派兵 多國商討安全保障
B費上演帽子戲法 率隊大勝皇家社會
相關(guān)新聞
李飛飛團隊50美元復刻DeepSeek真相 基于Qwen微調(diào)而成
2025-02-07 07:46:12李飛飛團隊50美元復刻DeepSeek真相阿里云回應李飛飛團隊訓練AI 低成本高成效引關(guān)注
2025-02-07 08:07:52阿里云回應李飛飛團隊訓練AI李飛飛團隊用不到50美元訓練新模型 低成本挑戰(zhàn)尖端AI
2025-02-06 20:05:36李飛飛團隊用不到50美元訓練新模型“合肥造”機器人更聰明了
2025-02-28 11:47:26合肥造機器人更聰明了硅谷VC尋找下一個“李飛飛” 華人創(chuàng)業(yè)者成焦點
2024-08-28 13:49:55硅谷VC尋找下一個“李飛飛”李飛飛呼吁構(gòu)建以人為中心的AI生態(tài) 從觀察者到行動者
2025-02-25 18:11:17李飛飛呼吁構(gòu)建以人為中心的AI生態(tài)