小鵬X9竟在香港自己學會智駕了 展現強大AI學習力(2)
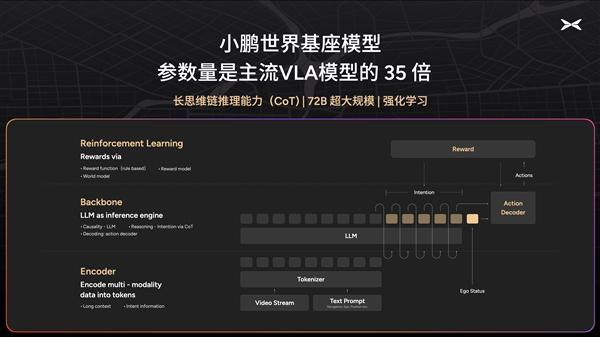
小鵬基座模型通過預訓練掌握自動駕駛的基礎能力,再通過強化學習從模仿學習走向創(chuàng)新思考,,幫助車輛處理未遇到過的極端案例,。例如,,有視頻顯示,,內地小鵬車主駕駛小鵬X9在香港部分路段使用了智駕系統(tǒng),,實現了自主避障,、超車,并快速學習香港交規(guī),,正確選擇路線,。這體現了小鵬世界基座大模型的強大學習能力。
今年,,小鵬的重要任務之一是為車輛換上車端大腦,,通過基座模型的知識蒸餾上車,突破車端模型參數量有限的問題,,提升上限,真正讓自動駕駛走向L3/L4甚至實現真正的無人駕駛,。

關閉

頤和園重新對游客開放 春日美景待客來
頤和園重新對游客開放2025-04-14 21:26:50

直擊美國歌手水果姐乘火箭上太空 全女性團隊創(chuàng)歷史
直擊美國歌手水果姐乘火箭上太空2025-04-14 21:23:53

海關查獲案值超190萬元金飾 374件黃金制品被截獲
海關查獲案值超190萬元金飾2025-04-14 21:21:09
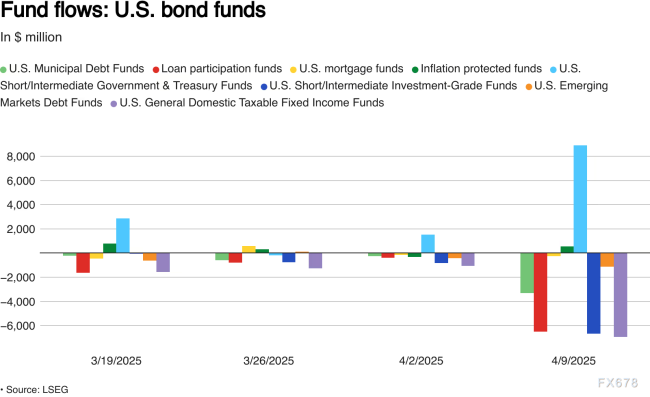
美債史詩級大逃亡,!單周撤資156億,貿易戰(zhàn)觸發(fā)全球資本大洗牌 全球資產配置變局
美債史詩級大逃亡,單周撤資156億,貿易戰(zhàn)觸發(fā)全球資本大洗牌2025-04-14 20:45:41

張若昀主演的《風起大漠》刪至75集 九年磨一劍終將播出
張若昀主演的風起大漠刪至75集2025-04-14 20:55:40
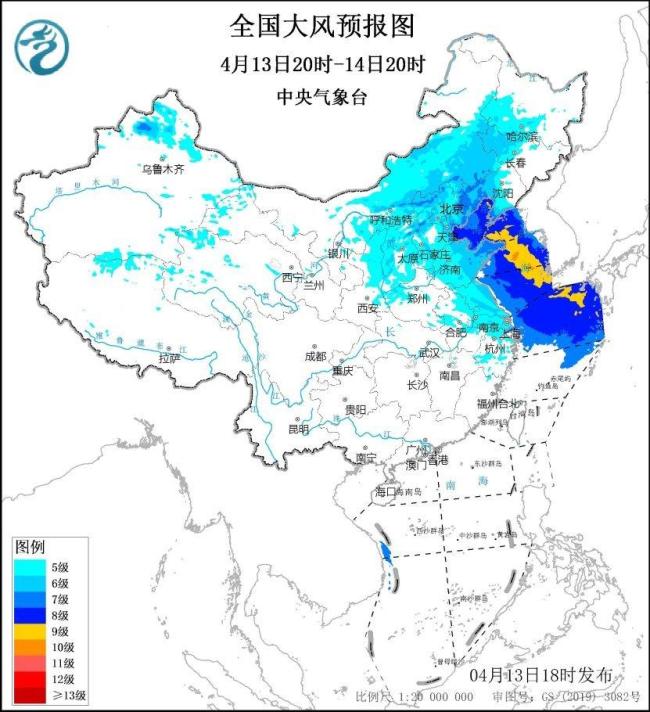
中央氣象臺18時發(fā)布大風藍色預警 多地區(qū)將受強風影響
中央氣象臺18時發(fā)布大風藍色預警2025-04-14 20:52:45

大V:尹錫悅最高或被判無期徒刑 首場公審開啟
大V,尹錫悅最高或被判無期徒刑2025-04-14 20:25:37

評論員:俄襲擊蘇梅市是試探特朗普 國際譴責加劇沖突僵局
評論員,俄襲擊蘇梅市是試探特朗普2025-04-14 20:09:17
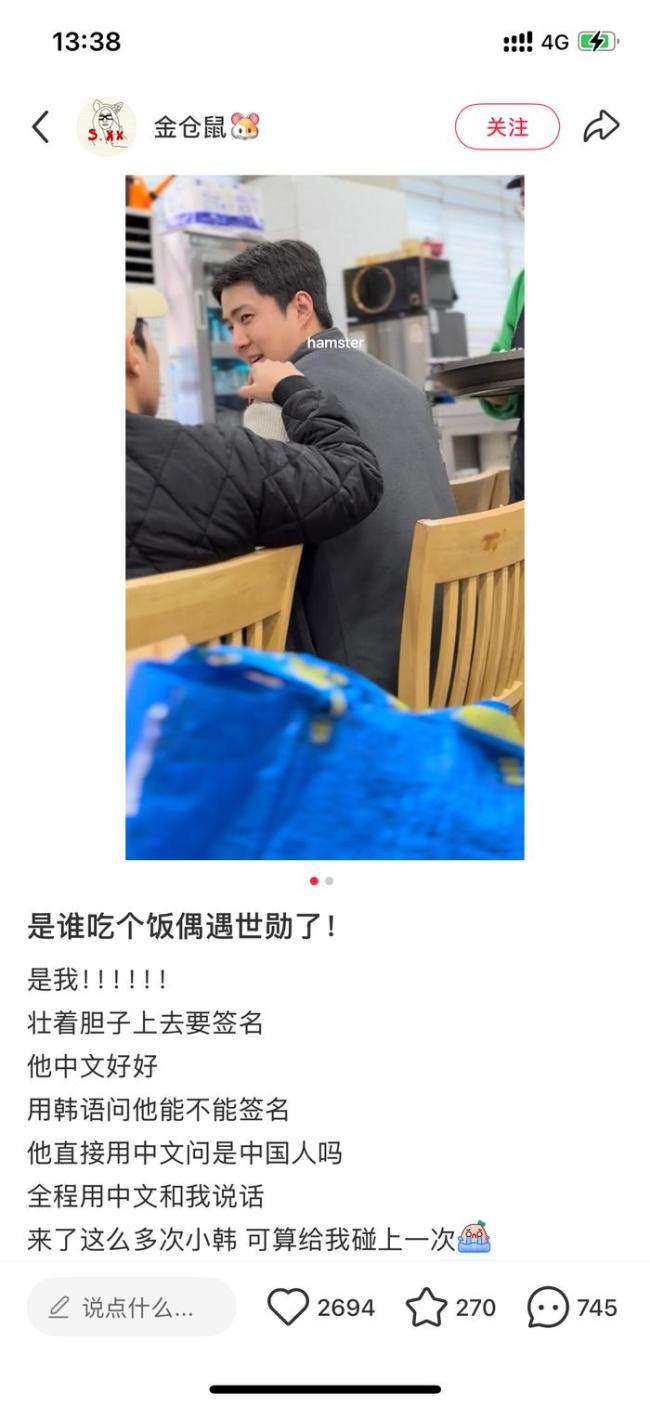
網友韓國吃飯偶遇了吳世勛,,吳世勛全中文和粉絲對話
吳世勛全中文和偶遇粉絲對話2025-04-14 20:38:39

成年人要學會照顧好自己,!真正的奢侈是能冷靜處理突發(fā)狀況
成年人要學會照顧好自己2025-04-14 20:41:36

美國小型企業(yè)者稱很多庫存都是中國制造 貿易戰(zhàn)引發(fā)生存危機
美國小型企業(yè)者稱很多庫存都是中國制造2025-04-14 20:48:31
啄木鳥公示2項優(yōu)化調整方案 持續(xù)推進整改
啄木鳥公示2項優(yōu)化調整方案2025-04-14 20:43:41

美稱中美已通過中間人就關稅接觸 初步溝通展開
美稱中美已通過中間人就關稅接觸2025-04-14 20:30:40

夫婦遇害前叫醒熟睡兩女兒躲過一劫 嫌疑人曾返家告知父親其殺人
夫婦遇害前叫醒熟睡兩女兒躲過一劫2025-04-14 21:10:48
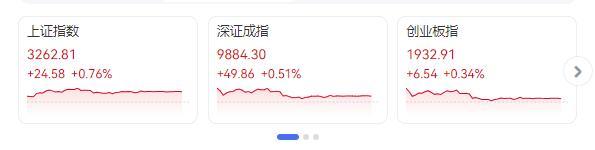
A股全面反彈 超4500股上漲 市場信心回暖
A股全面反彈超4500股上漲2025-04-14 20:33:07
公職人員晉升未果竟當起間諜 貪婪導致墮落
公職人員晉升未果竟當起間諜2025-04-14 20:39:20

臺灣便利店將轉型戰(zhàn)時樞紐 引發(fā)網友群嘲
臺灣便利店將轉型戰(zhàn)時樞紐2025-04-14 20:19:37

美大豆協會主席稱許多美國農民將破產 關稅戰(zhàn)重創(chuàng)農業(yè)出口
美大豆協會主席稱許多美國農民將破產2025-04-14 20:45:11

外交部敦促美方放棄極限施壓 對話解決問題
外交部敦促美方放棄極限施壓2025-04-14 20:42:44

記者:尹錫悅想主導韓國大選 面臨絕境的最后布局
記者,尹錫悅想主導韓國大選2025-04-14 20:25:05

國內多條航線票價大跳水 降幅最高達80%
國內多條航線票價大跳水2025-04-14 20:30:12

美前財長:美加征關稅政策非常危險 損害美元地位
美前財長,美加征關稅政策非常危險2025-04-14 20:50:57

2024年北京版權十件大事發(fā)布 百姓心中的豐臺印記
2024年北京版權十件大事發(fā)布2025-04-14 21:16:02
直擊美國歌手水果姐乘火箭上太空 全女性團隊創(chuàng)歷史
直擊美國歌手水果姐乘火箭上太空2025-04-14 21:23:53

渤海海峽黃海北部執(zhí)行軍事任務 禁止駛入區(qū)域公告
渤海海峽黃海北部執(zhí)行軍事任務2025-04-14 20:34:10
海關查獲案值超190萬元金飾 374件黃金制品被截獲
海關查獲案值超190萬元金飾2025-04-14 21:21:09

美國3月雞蛋價格同比上漲60.4% 禽流感與關稅雙重壓力
美國3月雞蛋價格同比上漲60,4%2025-04-14 20:35:53
英方允許接管中資擁有的英國鋼鐵公司 外交部回應 呼吁公平對待中企
英方允許接管中資擁有的英國鋼鐵公司外交部回應2025-04-14 20:16:48

全紅嬋被扔娃娃陳若琳下意識保護 粉絲熱情引發(fā)小插曲
全紅嬋被扔娃娃陳若琳下意識保護2025-04-14 20:27:32

臺名嘴:特朗普政策粗糙且朝令夕改 政策隨意自食其果
臺名嘴,特朗普政策粗糙且朝令夕改2025-04-14 20:36:32
頤和園重新對游客開放 春日美景待客來
頤和園重新對游客開放2025-04-14 21:26:50

NBA常規(guī)賽總結:60+勝球隊均遭質疑 瘋狂賽季波瀾壯闊
NBA常規(guī)賽總結,60+勝球隊均遭質疑2025-04-14 21:11:19

奧斯卡導演稱中國的成就離不開共產黨和人民!
奧斯卡導演稱中國的成就離不開共產黨和人民2025-04-14 20:48:01
易烊千璽朱一龍新片上演精彩對決 諜戰(zhàn)前沿無聲較量
易烊千璽朱一龍新片上演精彩對決2025-04-14 20:44:10

媒體:美國關稅豁免“偷感”很重 低調讓步背后
媒體,美國關稅豁免偷感很重2025-04-14 20:22:15
相關新聞
周鴻祎喜提小鵬X9 舒適與科技兼?zhèn)?/a>
2024-10-28 16:35:15周鴻祎喜提小鵬X9小鵬汽車加速出海布局 X9登陸東南亞
2025-02-24 08:47:38小鵬汽車加速出海布局何小鵬稱X9是唯一開著不像司機的MPV
2024-12-18 14:45:57何小鵬稱X9是唯一開著不像司機的MPV周鴻祎喜提小鵬X9 何小鵬親自交車 科技大佬的新寵座駕
2024-10-29 08:45:38周鴻祎喜提小鵬X9首批小鵬X9右舵版正式發(fā)運泰國市場 開啟東南亞市場新征程
2025-02-23 11:03:22首批小鵬X9右舵版正式發(fā)運泰國市場小鵬X9屏幕夾斷5歲男童半節(jié)食指 家長索賠10萬
2025-03-26 16:36:25小鵬X9屏幕夾斷5歲男童半節(jié)食指