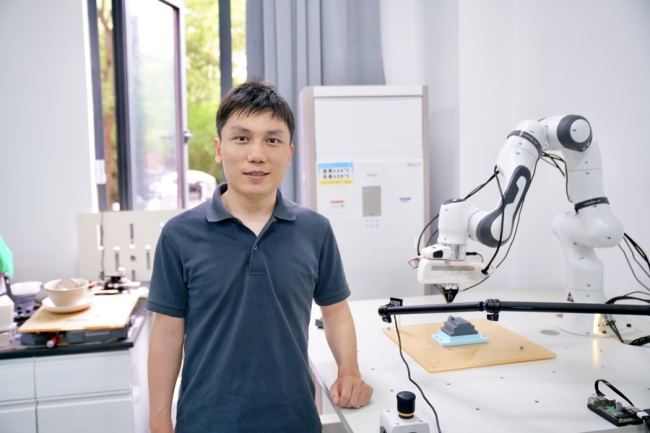
機器人觸覺研究獲突破 讓機器手更“聰明能干”
機器人的功能再炫酷,,最終還是得能“用”,。上海交通大學船舶海洋與建筑工程學院長聘副教授馬道林一直致力于解決具身智能發(fā)展的難點——觸覺,,這是機器人能“用”的基礎,。馬道林的研究論文在全球頂級學術(shù)會議——國際機器人與自動化大會上獲最佳論文獎,從4000多篇參會論文中脫穎而出,。他去年5月創(chuàng)立的硬核科技企業(yè)——千覺機器人科技(上海)有限公司至今已獲得三輪融資,,其研發(fā)生產(chǎn)的多模態(tài)觸覺傳感器已在國內(nèi)頭部機器人企業(yè)應用。馬道林團隊還正與寧德時代合作,,對用機械手裝配電池開展概念驗證研究,,在工業(yè)自動化領域已接近產(chǎn)線應用。

橫跨學術(shù)界和產(chǎn)業(yè)界,,馬道林表示科研一定會有人才,、就業(yè)、企業(yè)合作等溢出效應,,希望這種溢出能在自己的祖國發(fā)生,。一只機器手摸過一排字,立馬就能識別出其中含義,。這只機器手搭載的是馬道林團隊自研的千覺G1-WS多模態(tài)觸覺傳感器,。這個全球領先的傳感器測量分辨率精度達每平方厘米5萬個測量點,突破了傳統(tǒng)觸覺傳感器的感知界限,,信息感受密度達到人類手指的800倍,,使機器手能夠靈活地完成毫米級精細操作任務,比如拆開電腦主機裝內(nèi)存條,。
人類大腦協(xié)同控制手腕,、手指,,實現(xiàn)精細操作,靠的就是觸覺?,F(xiàn)在的機器人雖然能完成很多高難度動作,,但要像人類一樣依靠機器手的觸覺將信息反饋給“大腦”,再由“大腦”處理這些信息并指揮機器手精細操作,,仍然很難,。因此,目前全球工業(yè)界只有3%至4%的剛性,、規(guī)則物品能夠由機器人自動生產(chǎn)搬運,,剩余96%的柔性、異形,、易損物品仍然需要人力完成,。按照傳統(tǒng)視覺與觸覺配合的路徑,很難提升機器手完成精細任務的成功率,。原因在于,,視覺容易被遮擋,而且有視角限制,。觸覺信息與視覺信息不僅模態(tài)不同,信息流特征也有顯著差異,。視覺獲取的信息通常是連貫的,,而觸覺在與物體接觸后只觸發(fā)局部信號;視覺對物體位置的感知精度基本在毫米級,,觸覺往往需要微米級,。馬道林另辟蹊徑,提出了“依靠觸覺和接觸構(gòu)建空間感知”的機器人精細動作操作路徑,,“繞過”視覺信息處理,,只需要一個多模態(tài)觸覺處理器就能解析物體的形狀、旋轉(zhuǎn),、位移,、摩擦、滑動等多模態(tài)信息的綜合處理,,從而實現(xiàn)對力度和位置的精細化控制,。

選擇研究機器人觸覺是馬道林在美國麻省理工學院Mcube實驗室從事博士后研究時就定下的目標。2021年,,馬道林回國,,在上海交大創(chuàng)立了操作感知與智能實驗室(MPI Lab),帶著一群年輕人共同開展機器人觸覺領域前沿研究,。團隊的核心人員平均年齡不超過30歲,。他們在實驗室中的科研突破可以到產(chǎn)業(yè)中驗證,,也可以依托產(chǎn)業(yè),對已落地技術(shù)進行更前瞻的挖掘和研究,,形成產(chǎn)學研用的良性循環(huán),。馬道林不僅研發(fā)出了全球領先的觸覺傳感器,還開發(fā)了全球首個能精確模擬切向運動和切向力的觸覺仿真工具Xense_Sim,。用這個仿真工具收集的觸覺數(shù)據(jù)參與對具身智能大模型的訓練,,再把大模型部署到機器人上,可以讓機器人變得更聰明能干,。團隊還影響了一批本科生投身科研,。船建學院2022級強基班本科生丁陽暉正是因為馬道林的科研分享,對機器人研究產(chǎn)生了興趣,。去年,,丁陽暉的研究課題《面向柔性體感知的觸覺伺服研究》獲國家自然科學基金青年學生基礎研究項目資助。馬道林帶教班級中還有4名本科生根據(jù)各自科研項目撰寫的論文進入投稿或?qū)徃鍫顟B(tài),,其中包括中科院一區(qū)雜志,。隨著AI迅速發(fā)展,機器人硬件控制將迅速迭代,,具身智能領域?qū)⑷〉镁薮蟀l(fā)展,,實際應用場景即將到來,也期待為這些場景的實現(xiàn)作貢獻,。

清華女碩士靠文眉月入3萬元 轉(zhuǎn)行引發(fā)熱議
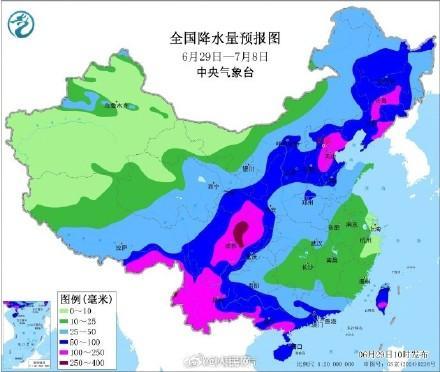
北方雨季或提前開啟 多地降雨偏多

中方恢復日本水產(chǎn)品進口 外交部回應 基于科學證據(jù)和審慎研究

中紀委周末打虎:59歲省委常委被查 海南反腐風暴持續(xù)
清華女碩士靠文眉月入3萬元 轉(zhuǎn)行引發(fā)熱議

普京已確定要來華,,特朗普非常期待,中美俄元首能在北京碰頭嗎,? 全球外交圈屏息以待

德國戰(zhàn)機緊急升空 攔截俄偵察機

印度兩萬留學生來華學技術(shù),,享免費與補助,這波操作圖個啥,?

公開爭吵后特朗普再談馬斯克 贊賞其了不起

若特朗普9月訪華意味著什么 中美歷史性突破
中方恢復日本水產(chǎn)品進口 外交部回應 基于科學證據(jù)和審慎研究

殲-20成為戰(zhàn)斗警巡東海重要力量:我們肯定不能退讓,!

北約峰會召開之際,日本想再探探中國底線,?要在臺島周邊修避難所

美國直升機空中撒下大量美元 遺愿實現(xiàn)引發(fā)熱議

白象說到做到面餅120克上市 透明化回應消費者關(guān)切
非法醫(yī)美培訓亂象 零基礎速成班背后的隱患
伊朗若采購殲-10CE能否如愿 迎來反擊新機遇
北方雨季或提前開啟 多地降雨偏多
貴州榕江7小時前后變化,!

專家:山東艦訪港展示綜合國防能力 彰顯海軍現(xiàn)代化建設成果

特斯拉沒牌打了 Robotaxi成最后希望

馬斯克的Robotaxi首秀為何“翻車”

美國呼吁在伊公民趕快撤離 局勢風險升級

榕江款物捐贈聯(lián)系人稱不缺物資了 家園重建待客來

武契奇談塞爾維亞首都抗議活動 誓言強硬應對“外國勢力”操控陰謀!

美專家盛贊中式殺傷鏈說明什么

剛剛,,中國人又喝出一個IPO:if椰子水上市了

加拿大政府回應白宮威脅 立場不變,!

巴基斯坦軍方一車隊遭到襲擊 13名軍人遇難

專家:烏亞速旅反攻遭重創(chuàng)

北京90歲老人被養(yǎng)女毆打 法院這樣做
很多病都是“撐”出來的!正確保持“饑餓感”有助于延長壽命

英國為何要高調(diào)介入南海 刷存在感還是配合美國唱雙簧,?

演員管樂在社交媒體直播中首次正面回應與王皓分手傳聞

牛彈琴:武契奇面臨嚴峻考驗
相關(guān)新聞
電子皮膚讓機器人有了觸覺 感知細微觸感
2025-04-09 11:02:24電子皮膚讓機器人有了觸覺電子皮膚讓機器人有了“觸覺” 感知細微觸感
2025-04-10 14:38:33電子皮膚讓機器人有了觸覺科學家最新研究:讓機器人通過“照鏡子”實現(xiàn)自我認知突破 邁向自主修復與適應
哥倫比亞大學機械工程系主任霍德·利普森領導的研究團隊開發(fā)了一種新策略,,使機器人能夠通過觀察自身運動來理解自己的結(jié)構(gòu)和運動方式
2025-03-03 09:54:37科學家最新研究孫環(huán)波任北大工學院助理教授 觸覺感知研究新力量
2025-03-19 21:06:07孫環(huán)波任北大工學院助理教授vivo官宣成立機器人Lab 聚焦家庭機器人研究
3月24日,vivo宣布成立機器人LAB獨立中心,,該中心將致力于機器人相關(guān)產(chǎn)品的研發(fā)與孵化,,主要聚焦于家庭機器人領域
2025-03-25 17:38:21vivo官宣成立機器人Lab觸覺或為具身智能最后一塊拼圖 機器人“電子皮膚”成標配?
2025-06-06 09:44:18觸覺或為具身智能最后一塊拼圖








