嫦娥六號(hào)返回,如何精確制導(dǎo),?
“中國(guó)嫦娥”再次上演“翩然落廣寒”的精彩一幕:北京時(shí)間2024年6月2日6時(shí)23分,嫦娥六號(hào)著陸器和上升器組合體在鵲橋二號(hào)中繼星支持下,,成功著陸在月球背面南極-艾特肯盆地預(yù)選著陸區(qū),。
這是我國(guó)實(shí)施的第五次地外天體軟著陸、第四次月球表面軟著陸,,以及第二次月球背面軟著陸,,標(biāo)志著嫦娥六號(hào)成功跨過(guò)充滿(mǎn)挑戰(zhàn)的“落月”難關(guān),為達(dá)成人類(lèi)首次月球背面采樣返回目標(biāo)又向前邁出了關(guān)鍵一步,。
5月3日,嫦娥六號(hào)探測(cè)器成功發(fā)射入軌,,此后經(jīng)歷了地月轉(zhuǎn)移、近月制動(dòng),、環(huán)月飛行,、著陸下降等過(guò)程。嫦娥六號(hào)探測(cè)器由軌道器,、返回器、著陸器,、上升器組成。5月30日,,著陸器和上升器組合體與軌道器和返回器組合體實(shí)現(xiàn)在軌分離,如今成功著陸月球背面,。
正所謂“千錘百煉出真功”,,多項(xiàng)“硬核技術(shù)”在此次落月任務(wù)中盡顯中國(guó)力量。
“選址講究”平穩(wěn)著陸
嫦娥六號(hào)任務(wù)副總設(shè)計(jì)師王瓊介紹,,嫦娥六號(hào)任務(wù)實(shí)施人類(lèi)首次月背采樣返回,工程創(chuàng)新多,、風(fēng)險(xiǎn)高、難度大,,相比2020年實(shí)現(xiàn)月球正面采樣返回的嫦娥五號(hào)任務(wù),,嫦娥六號(hào)任務(wù)突破了月球逆行軌道設(shè)計(jì)與控制技術(shù),,并將在鵲橋二號(hào)中繼星的支持下,,完成月背智能快速采樣,、月背起飛上升等關(guān)鍵技術(shù)節(jié)點(diǎn)。
“其著陸區(qū)選擇直接關(guān)系到工程實(shí)施的風(fēng)險(xiǎn)控制,、采樣樣品的科學(xué)成果產(chǎn)出等?!蓖醐傉f(shuō),相比月球正面,,月球背面地形更為崎嶇,,尤其是南極-艾特肯盆地區(qū)域整體地勢(shì)較低且撞擊坑分布更多,,光照和測(cè)控更易受到地形遮擋影響,。這些因素都給嫦娥六號(hào)落月選址工作帶來(lái)了挑戰(zhàn)。
嫦娥六號(hào)探測(cè)器由航天科技集團(tuán)五院抓總研制,,據(jù)該院專(zhuān)家介紹,,為了讓嫦娥六號(hào)能夠穩(wěn)穩(wěn)著陸月背,,五院研制團(tuán)隊(duì)深入研討和分析了月背采樣任務(wù)的選址難點(diǎn)和特點(diǎn),充分借鑒融合深空探測(cè)以往型號(hào)的選址經(jīng)驗(yàn),,建立了一套適用于月背著陸的選址方法,。
6月2日6時(shí)9分,嫦娥六號(hào)著陸器和上升器組合體開(kāi)始實(shí)施動(dòng)力下降,,7500牛變推力主發(fā)動(dòng)機(jī)開(kāi)機(jī),。其間,,組合體進(jìn)行快速姿態(tài)調(diào)整,,逐漸接近月表,。
五院專(zhuān)家表示,,研制團(tuán)隊(duì)利用以往型號(hào)遙感數(shù)據(jù),對(duì)著陸區(qū)復(fù)雜地形地貌情況進(jìn)行深入分析與確認(rèn),,為著陸器和上升器組合體在月球表面尋找滿(mǎn)足安全著陸、月面工作,、月面起飛等需求的區(qū)域,,并在確認(rèn)著陸區(qū)后,對(duì)著陸區(qū)的地形地貌,、地質(zhì)條件等進(jìn)行了多輪復(fù)核與研究工作,,進(jìn)一步降低著陸風(fēng)險(xiǎn),保證選址區(qū)域分析完備,、選址約束考慮全面、選址結(jié)果可信可用,。
2日當(dāng)天,組合體通過(guò)視覺(jué)自主避障系統(tǒng)進(jìn)行障礙自動(dòng)檢測(cè),,利用可見(jiàn)光相機(jī)根據(jù)月面明暗選擇大致安全點(diǎn),在安全點(diǎn)上方100米處懸停,,利用激光三維掃描進(jìn)行精確拍照以檢測(cè)月面障礙,,最終選定著陸點(diǎn),,開(kāi)始緩速垂直下降,,即將到達(dá)月面時(shí)發(fā)動(dòng)機(jī)關(guān)閉,利用緩沖系統(tǒng)保障組合體以自由落體方式到達(dá)月面,,最終平穩(wěn)著陸于月球背面南極-艾特肯盆地,。
“兩次避障”精準(zhǔn)落月
目前,,“嫦娥”家族使用的GNC系統(tǒng)均由五院502所研制。GNC,,為制導(dǎo)(Guidance),、導(dǎo)航(Navigation)與控制(Control)的簡(jiǎn)稱(chēng)。該系統(tǒng)需要實(shí)時(shí)知道“我在哪兒”“我要去哪兒”和“我怎么去”,,它就像嫦娥六號(hào)著陸器和上升器組合體落月過(guò)程中的“駕駛員”,在極具挑戰(zhàn)的落月過(guò)程中完成“飛行軌跡控制”“安全著陸點(diǎn)選擇”“精準(zhǔn)控制”三項(xiàng)核心任務(wù),。
五院502所專(zhuān)家介紹,,嫦娥六號(hào)GNC系統(tǒng)需要在下降過(guò)程中自主選擇一個(gè)既符合著陸要求,又能滿(mǎn)足上升器月面起飛條件的落點(diǎn),,為后續(xù)的采樣和起飛創(chuàng)造良好條件。之后,,組合體開(kāi)始徑直飄移至選定落點(diǎn)的正上方并開(kāi)始垂直下降,,至月面特定高度時(shí)關(guān)閉主發(fā)動(dòng)機(jī),,最終利用著陸腿的緩沖機(jī)構(gòu)實(shí)現(xiàn)軟著陸。
王瓊表示,,嫦娥六號(hào)探測(cè)器“出發(fā)”前,,地面科研人員只能通過(guò)衛(wèi)星遙感影像了解著陸區(qū)概況。真正著陸時(shí)究竟會(huì)遇到多少石塊,、撞擊坑,,都無(wú)法提前獲知,。
落月過(guò)程中,嫦娥六號(hào)著陸器和上升器組合體在GNC系統(tǒng)智能自主地操控下,,邊降落邊快速調(diào)整姿態(tài),,對(duì)預(yù)定著陸區(qū)域進(jìn)行拍照分析,選擇著陸區(qū)域,。然后,,GNC系統(tǒng)控制組合體飛向選定區(qū)域。這是第一次避障,,即“粗避障”。
在距離月面更近的預(yù)定高度時(shí),,著陸器和上升器組合體開(kāi)始實(shí)施關(guān)鍵的短暫懸停,,并再次對(duì)月面進(jìn)行拍照,精確避開(kāi)障礙,,選定最終落點(diǎn),。這是第二次避障,即“精避障”,。
這先后兩次的障礙識(shí)別與落點(diǎn)選擇,,即所謂“粗精接力避障”技術(shù),其中算法是精髓,。
專(zhuān)家稱(chēng),,為適應(yīng)月背降落,,嫦娥六號(hào)GNC系統(tǒng)針對(duì)新的軌道以及鵲橋二號(hào)中繼星通信部分進(jìn)行了適應(yīng)性調(diào)整。因嫦娥六號(hào)相比嫦娥五號(hào)要消耗更多的推進(jìn)劑,,研制人員對(duì)系統(tǒng)進(jìn)行了針對(duì)性調(diào)整,、優(yōu)化和升級(jí),在確保落月精度的同時(shí)又兼顧了資源使用的經(jīng)濟(jì)性,。
“月背對(duì)話”大幅提速
嫦娥六號(hào)的落點(diǎn)在月球背面,,落月過(guò)程地球不可見(jiàn)。雖然嫦娥六號(hào)具有“自主落月”的能力,,但實(shí)時(shí)掌握各項(xiàng)數(shù)據(jù),、隨時(shí)發(fā)出控制指令,才能讓“地球家人”及時(shí)掌握任務(wù)的實(shí)施過(guò)程,。
落月時(shí),,地球上的控制中心和嫦娥六號(hào)探測(cè)器之間會(huì)產(chǎn)生大量的信息,這些信息的傳輸是由五院航天東方紅衛(wèi)星有限公司抓總研制的鵲橋二號(hào)中繼星支持完成的,。
與鵲橋中繼星距月面最遠(yuǎn)9萬(wàn)公里的距離相比,,鵲橋二號(hào)中繼星遠(yuǎn)月點(diǎn)距離月面的最遠(yuǎn)距離約為1.6萬(wàn)公里。這使得鵲橋二號(hào)中繼星在天線口徑不變的情況下,,大幅提高了通信速率,。
五院專(zhuān)家介紹,相較于鵲橋中繼星,,研制團(tuán)隊(duì)還將鵲橋二號(hào)中繼星的兩個(gè)鏈路——從中繼星到月面探測(cè)器,、從月面探測(cè)器到中繼星的最高碼速率提高了近10倍,對(duì)地?cái)?shù)據(jù)傳輸鏈路的最高碼速率提高了近百倍,,讓通信能力“如虎添翼”,。
值得一提的是,鵲橋二號(hào)中繼星把同時(shí)接收探測(cè)器數(shù)據(jù)的數(shù)據(jù)傳輸通道,,從鵲橋中繼星的兩路提高到了最多10路,,在大幅提升通信速率的基礎(chǔ)上又大幅增加了傳輸通道。這一設(shè)計(jì)使大量的數(shù)據(jù)通信成為可能,,讓“不可見(jiàn)”的月背降落“一切盡在掌握”,。
“纖纖美腿”輕盈落月
著陸月球背面可以說(shuō)是“環(huán)環(huán)相扣、險(xiǎn)象環(huán)生”,,如果沒(méi)有距離和速度信息的支持,,嫦娥六號(hào)著陸器將處于“盲人瞎馬”的窘境。
由五院西安分院研制的微波測(cè)距測(cè)速敏感器在著陸過(guò)程中起到了至關(guān)重要的作用,。它就像是在著陸器上安裝了一部“泊車(chē)?yán)走_(dá)”,,幫助著陸器和上升器組合體實(shí)現(xiàn)月背軟著陸。
五院專(zhuān)家介紹,這部“雷達(dá)”在著陸器接近月球表面時(shí)開(kāi)始工作,,細(xì)致測(cè)量各項(xiàng)數(shù)據(jù)并進(jìn)行精確信息傳遞,,以便著陸器判斷著陸點(diǎn)和降落速度,確保嫦娥六號(hào)控制身姿順利“泊車(chē)”,,為安全精準(zhǔn)著陸提供可靠保障,。
嫦娥六號(hào)著陸器和上升器組合體在月背軟著陸之前,還要經(jīng)受住“最后一落”的沖擊,。由五院529廠打造的4條輕質(zhì),、高強(qiáng)的“纖纖美腿”讓嫦娥六號(hào)落月更輕盈。
可別小看這“修長(zhǎng)美腿”,,它的學(xué)名是“著陸緩沖機(jī)構(gòu)”,,每條著陸腿都由一個(gè)主腿、兩個(gè)副腿和一個(gè)足墊組成,,各有分工,、各司其職。在著陸前,,采用特殊材料填充的主副腿協(xié)同工作,,在著陸時(shí)安全地支撐住探測(cè)器的身體,將各種沖擊力傳遞,、吸收,。
專(zhuān)家介紹,除擁有“修長(zhǎng)美腿”,,嫦娥六號(hào)著陸器還搭配了4個(gè)被稱(chēng)為“足墊”的圓形“大腳掌”,。它看上去像4個(gè)大臉盆,直徑差不多是普通人腳掌的兩倍,,其盆狀結(jié)構(gòu)以及設(shè)計(jì)巧妙的“足弓”,,可以起到更好的緩沖作用,防止探測(cè)器在著陸月背時(shí)“摔倒”,,提升嫦娥六號(hào)落月時(shí)的舒適“腳感”,。
在著陸器的動(dòng)力下降階段,由五院510所為嫦娥六號(hào)探測(cè)器裝備的著陸緩沖機(jī)構(gòu)信號(hào)裝置也開(kāi)啟了工作模式,。專(zhuān)家表示,,當(dāng)著陸器到達(dá)月球表面預(yù)定高度時(shí),該設(shè)備就會(huì)被觸發(fā)并產(chǎn)生信號(hào),,著陸器明確自身的展開(kāi)狀態(tài),準(zhǔn)備在月面著陸,。落月信號(hào)裝置在著陸“足墊”接觸月面時(shí),,受月面反作用力后觸發(fā)開(kāi)關(guān),關(guān)閉反推發(fā)動(dòng)機(jī),從而保證探測(cè)器安全平穩(wěn)落下,。
來(lái)自國(guó)家航天局的消息稱(chēng),,嫦娥六號(hào)著陸器和上升器組合體成功著陸后,著陸器將通過(guò)鵲橋二號(hào)中繼星,,在地面控制下,,進(jìn)行太陽(yáng)翼和定向天線展開(kāi)等狀態(tài)檢查與設(shè)置工作,此后正式開(kāi)始持續(xù)約兩天的月背采樣工作,,通過(guò)鉆具鉆取和機(jī)械臂表取兩種方式分別采集月壤樣品和月表巖石,,實(shí)現(xiàn)多點(diǎn)、多樣化自動(dòng)采樣,。同時(shí)將開(kāi)展月球背面著陸區(qū)的現(xiàn)場(chǎng)調(diào)查分析,、月壤結(jié)構(gòu)分析等科學(xué)探測(cè),深化月球成因和演化歷史的研究,。

法國(guó)政府投入14億歐元治理塞納河 力保奧運(yùn)水上項(xiàng)目順利進(jìn)行

三分9中6轟24 3,!必須拿到金牌,庫(kù)里賽后發(fā)聲,,還談到了詹姆斯

老員工:宗馥莉接班后頻繁更換中高層,,引內(nèi)部動(dòng)蕩擔(dān)憂

美歐密集宣示AI軍事化動(dòng)向,專(zhuān)家:相關(guān)動(dòng)態(tài)值得高度關(guān)注

賈玲楊紫要二搭了,,是誰(shuí)還沒(méi)期待兩位的二搭呢
法國(guó)政府投入14億歐元治理塞納河 力保奧運(yùn)水上項(xiàng)目順利進(jìn)行

女生釣到大肚魚(yú)烤熟后結(jié)果悲劇了 魚(yú)肚子里面都是便便

爆料!“他一直在努力挽回特朗普,,甚至…”

歐洲擔(dān)憂特朗普不支持對(duì)俄制裁,,法媒:若他上臺(tái)可能放棄烏克蘭,,迫使烏談判結(jié)束戰(zhàn)爭(zhēng)

日本被曝計(jì)劃挪用俄羅斯遭凍結(jié)資產(chǎn),,援烏數(shù)十億美元
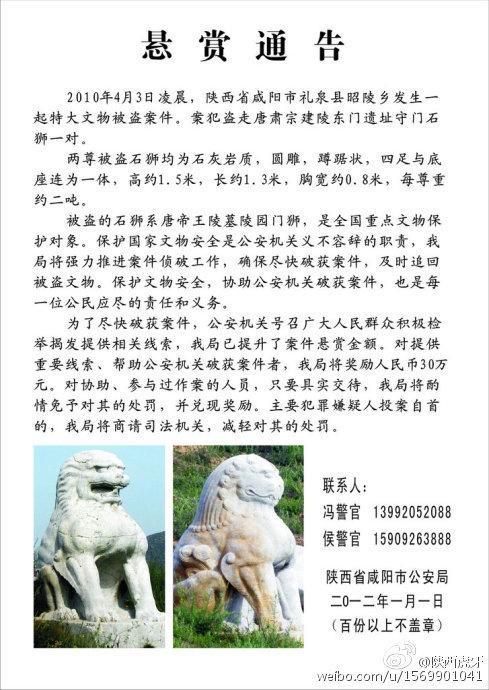
懸賞100萬(wàn),!陜西禮泉征集被盜石獅線索 文物追緝進(jìn)行時(shí)

德國(guó)明年對(duì)烏軍援將減半 軍援縮水背后的原因

拜登被民主黨領(lǐng)袖警告?白宮回應(yīng) 堅(jiān)持競(jìng)選,,望合作推進(jìn)議程

知情人士稱(chēng)宗馥莉請(qǐng)辭高管此前不知情 娃哈哈面臨交接挑戰(zhàn)

曝員工對(duì)宗馥莉頻換中高層有意見(jiàn) 娃哈哈接班風(fēng)波起

不死少女、傀儡師、神秘功法,,烏爾善拍中國(guó)首部異能大片,,要火!

澤連斯基批評(píng)莫迪訪俄“令人失望”,印度召見(jiàn)烏克蘭大使表達(dá)抗議
這個(gè)美國(guó)大佬,,慫了

楊紫長(zhǎng)相思15集定律 在兩季的第十五集都是高光大場(chǎng)面哭戲

外媒:澤連斯基稱(chēng)不擔(dān)心特朗普可能重返白宮,,“共和黨多數(shù)人支持烏克蘭”
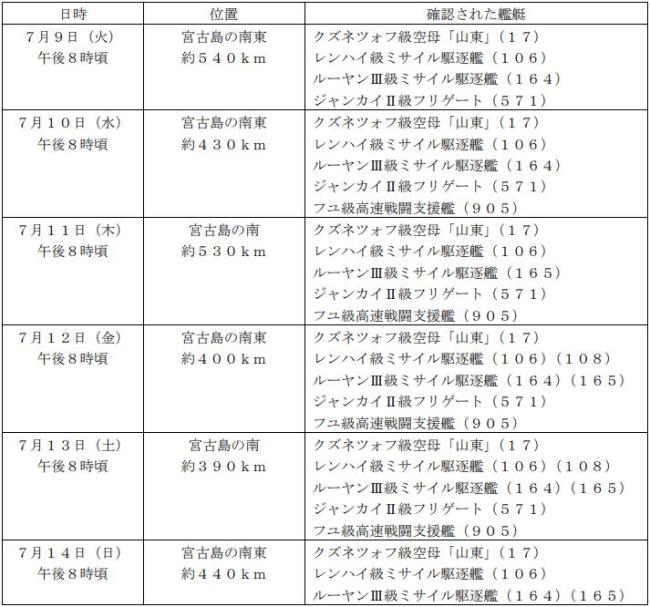
山東艦編隊(duì)持續(xù)一周在太平洋上訓(xùn)練

四川大廚飛往法國(guó)為運(yùn)動(dòng)員們做川菜 舌尖上的奧運(yùn)盛宴

俄美安理會(huì)激烈交鋒:俄外長(zhǎng)猛批美國(guó)霸權(quán)政策,美代表辯稱(chēng)并非壓制他國(guó)

美國(guó)國(guó)防情報(bào)局局長(zhǎng)炒作“中國(guó)威脅論”
老員工:宗馥莉接班后頻繁更換中高層,,引內(nèi)部動(dòng)蕩擔(dān)憂
三分9中6轟24 3!必須拿到金牌,,庫(kù)里賽后發(fā)聲,,還談到了詹姆斯

美國(guó)發(fā)現(xiàn):她是韓國(guó)秘密特工
“歐洲人不禁要問(wèn):我們是美國(guó)聽(tīng)話的下屬嗎?”

港星胡慧中現(xiàn)身女兒新書(shū)簽售會(huì) 一家溫馨支持,,詩(shī)意傳承夢(mèng)成真
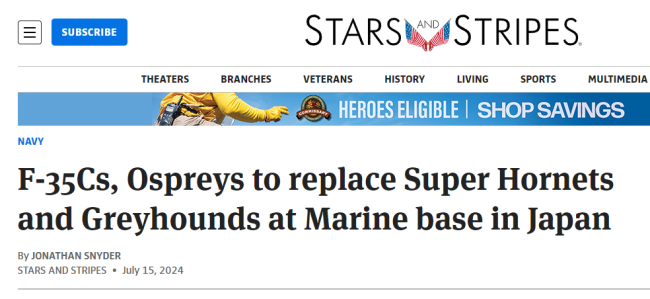
美軍隱形戰(zhàn)斗機(jī)對(duì)華C形包圍圈成形,然后呢,?

動(dòng)用主戰(zhàn)艦艇,、貼近實(shí)戰(zhàn)應(yīng)用,,中俄“海上聯(lián)合”演習(xí)收官,亮點(diǎn)有哪些,?

歐爾班致信提醒歐盟:如特朗普當(dāng)選,,支持烏克蘭戰(zhàn)爭(zhēng)的財(cái)政負(fù)擔(dān)將轉(zhuǎn)移到歐盟身上

歐盟拒絕歐爾班的和平提議:俄烏問(wèn)題不能沒(méi)有烏克蘭參與

金價(jià)沉寂多日再創(chuàng)歷史新高 全球投資者聚焦貴金屬狂潮

研究稱(chēng)全球變暖讓一天變長(zhǎng) 地球自轉(zhuǎn)放緩加劇
相關(guān)新聞
嫦娥六號(hào)已完成采樣 月球樣本返回受期待
2024-06-04 16:04:15嫦娥六號(hào)已完成采樣嫦娥六號(hào)實(shí)現(xiàn)世界首次月背采樣返回,!
2024-06-26 14:34:11嫦娥六號(hào)實(shí)現(xiàn)世界首次月背采樣返回嫦娥六號(hào)返回器將按照計(jì)劃返回 月背采樣任務(wù)圓滿(mǎn)成功
2024-06-03 16:34:36嫦娥六號(hào)返回器將按照計(jì)劃返回嫦娥六號(hào)任務(wù)新聞發(fā)布會(huì) 實(shí)現(xiàn)月背采樣返回新突破
2024-06-27 16:32:28嫦娥六號(hào)任務(wù)新聞發(fā)布會(huì)嫦娥六號(hào)任務(wù)圓滿(mǎn)成功 實(shí)現(xiàn)世界首次月球背面采樣返回
2024-06-25 15:43:29嫦娥六號(hào)任務(wù)圓滿(mǎn)成功嫦娥六號(hào)落月實(shí)況發(fā)布 月背采樣返回新突破
2024-06-02 18:09:10嫦娥六號(hào)落月實(shí)況發(fā)布