理想汽車為何押注司機(jī)大模型 邁向全自動駕駛
理想汽車為何押注司機(jī)大模型,!理想汽車借助端到端+VLM架構(gòu),,在輔助駕駛領(lǐng)域?qū)崿F(xiàn)了顯著進(jìn)步。為了進(jìn)一步鞏固在這一領(lǐng)域的優(yōu)勢,,甚至成為行業(yè)引領(lǐng)者,,理想汽車引入了新的技術(shù)架構(gòu)——VLA(視覺,、語言、行動)大模型,,也稱為司機(jī)大模型,。

5月7日晚,,理想汽車舉辦了“理想AI Talk第二季 李想面對面”線上活動。理想汽車創(chuàng)始人,、CEO李想?yún)⑴c討論了AI及其在輔助駕駛,、智能駕駛和汽車上的應(yīng)用思路。他認(rèn)為當(dāng)前的輔助駕駛系統(tǒng)與人類相比仍有較大差距,,而司機(jī)大模型的能力則接近甚至可能超越人類水平,,并且有望實現(xiàn)全自動駕駛。

理想汽車透露,,搭載VLA(司機(jī)大模型)的理想純電SUV i8將于7月發(fā)布上市,。盡管具體的上車時間未公布,但比此前預(yù)計的9月要提前,。

目前,,輔助駕駛系統(tǒng)的發(fā)展面臨一些問題。由于一些事故的影響,,系統(tǒng)的安全性受到質(zhì)疑,。對于理想汽車而言,,雖然其端到端+VLM雙系統(tǒng)開創(chuàng)了先河,,但仍需提升能力以達(dá)到更高的標(biāo)準(zhǔn)。
李想提到,,規(guī)則算法和端到端架構(gòu)存在兩個主要問題:一是難以處理復(fù)雜場景,,二是無法與人溝通。相比之下,,VLA架構(gòu)能夠更好地理解復(fù)雜場景并通過生成數(shù)據(jù)進(jìn)行訓(xùn)練,。此外,它還能通過語言理解指令,,從而更靈活地執(zhí)行任務(wù),。例如,在小區(qū)等開放空間中,,司機(jī)大模型可以與導(dǎo)航系統(tǒng)配合,,完成復(fù)雜的駕駛?cè)蝿?wù)。
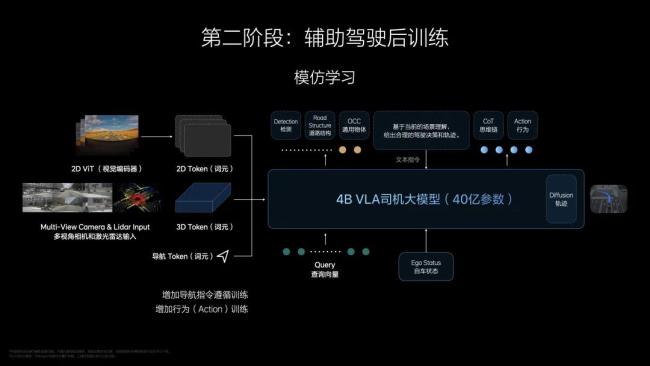
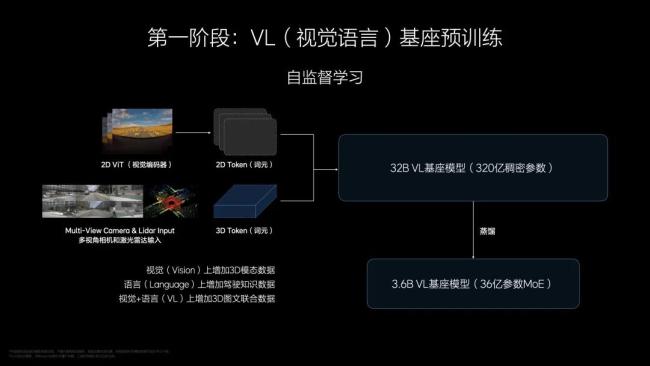
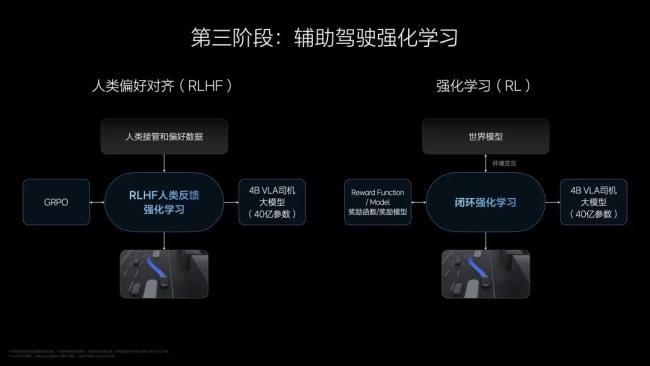
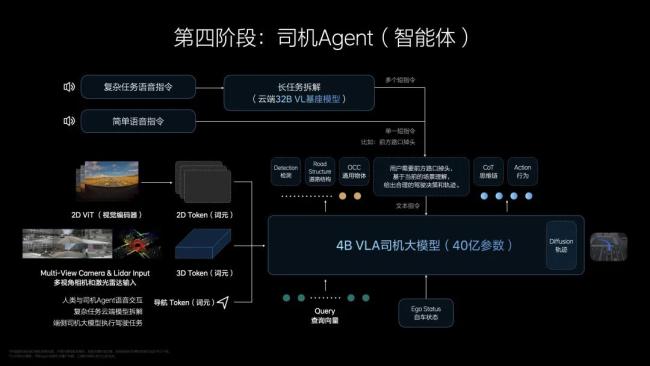
VLA架構(gòu)的訓(xùn)練分為四個步驟,。首先,,訓(xùn)練一個VL(視覺和語言)基座模型,該模型包含大量3D和2D視覺語料以及交通相關(guān)的語言資料,。其次,,將行動部分加入模型,使其從VL模型變?yōu)閂LA模型,。第三步是強(qiáng)化訓(xùn)練,,包括基于人類反饋的強(qiáng)化學(xué)習(xí)和純粹的強(qiáng)化學(xué)習(xí),。最后一步是構(gòu)建一個能夠理解司機(jī)語音指令的Agent。
李想表示,,VLA架構(gòu)最早可能在交通領(lǐng)域得到廣泛應(yīng)用,,因為交通規(guī)則明確且具有確定性。盡管VLA架構(gòu)目前是能力最強(qiáng)的,,但不一定是最高效的,。未來可能會出現(xiàn)更高效的新架構(gòu)。面對當(dāng)前社會對輔助駕駛的負(fù)面評價,,李想認(rèn)為這類似于黎明前的黑暗,,光明即將到來。


于東來邀請柴懟懟考察胖東來 硬氣反擊謠言

劉德華:還想生???

在倫敦街頭抓偷手機(jī)的賊,敢偷中國人的手機(jī)你是瘋了吧

名嘴談美軍戰(zhàn)機(jī)10天內(nèi)三度出事故 航母頻遇險情

巴方調(diào)大批中式坦克到邊境,?大V解讀 局勢緊張引發(fā)關(guān)注
在倫敦街頭抓偷手機(jī)的賊,,敢偷中國人的手機(jī)你是瘋了吧
馬斯克圍觀阿維塔“風(fēng)阻門” 參數(shù)爭議引關(guān)注

專家解讀印巴是否會全面開戰(zhàn) 沖突有限升級可能性小

巴方稱若非克制至少可擊落十架印戰(zhàn)機(jī) 沖突升級引發(fā)多方關(guān)注

體操冠軍吳柳芳改賽道了,穿民族服裝美美噠

市民夜騎34公里偷蘭花被處理 貪念作祟終落網(wǎng)

評論員談中方艦艇驅(qū)離菲護(hù)衛(wèi)艇 依法依規(guī)警告驅(qū)離

重慶大學(xué)回應(yīng)本科生發(fā)14篇SCI論文 初中就已申請發(fā)明專利

皇馬眾將觀戰(zhàn)巴薩不敵國米,,備戰(zhàn)國家德比 利用對手疲憊求勝

常州發(fā)現(xiàn)全球極危物種 黃胸鹀再現(xiàn)

四川一棵380多年古樹被砍 社區(qū)回應(yīng) 為排險而砍伐

特朗普為何幫忙解決印巴沖突 外交姿態(tài)背后的動機(jī)
港理大研究揭示:塑膠廢物潛藏微生物群落或引發(fā)生態(tài)危機(jī) 威脅微生物生態(tài)平衡

童劍任江蘇常州市委組織部部長 新職務(wù)明確

印度被擊落戰(zhàn)機(jī)連編號都證實了 巴軍方大獲全勝

殲10C是怎么擊殺印度陣風(fēng)的 戰(zhàn)術(shù)革新展現(xiàn)優(yōu)勢

學(xué)者:印巴局勢會否升級取決于巴方 軍事對抗引發(fā)全面戰(zhàn)爭擔(dān)憂

五一假期北京文旅市場釋放新活力 科技賦能文旅新體驗

名嘴談關(guān)稅戰(zhàn)后首批中國貨船抵洛杉磯 進(jìn)口量腰斬引發(fā)擔(dān)憂

中國空軍首次出動體系力量赴非洲聯(lián)訓(xùn) 中埃“文明之鷹-2025”圓滿閉幕
于東來邀請柴懟懟考察胖東來 硬氣反擊謠言

丹麥回應(yīng)美被爆加強(qiáng)對格陵蘭島情報收集 特朗普計劃引發(fā)爭議

央行:5年期以上首套房利率降至2.6% 一攬子金融政策出臺

丹麥擬大規(guī)模擴(kuò)張海軍力量 加速現(xiàn)代化建設(shè)

婚介機(jī)構(gòu)廣告牌現(xiàn)越南新娘七天領(lǐng)證 引發(fā)合法性質(zhì)疑

斯洛伐克總理菲佐痛斥愛沙尼亞 禁止專機(jī)飛越領(lǐng)空
劉德華:還想生???

印巴沖突驟然升級 中方呼吁大局為重 保持冷靜克制

印度方面究竟損失了多少飛機(jī) 空中對決成羅生門

“好朋友”來玩,狗狗示意主人開門
相關(guān)新聞
理想高管:理想汽車不會在行駛中OTA
2024-12-16 09:32:44理想汽車不會在行駛中OTA董明珠不想下車 堅定押注新能源汽車
2024-10-20 20:42:29董明珠不想下車理想高管辟謠“理想汽車是力帆車” 從未用過代工
2025-02-10 15:19:16理想高管辟謠理想汽車是力帆車理想汽車4月交付33939輛汽車 同比增長31.6%
2025-05-01 11:06:40理想汽車4月交付33939輛汽車理想開源汽車操作系統(tǒng) 引領(lǐng)智能汽車新生態(tài)
3月27日,2025中關(guān)村論壇年會開幕,,會上發(fā)布了重大科技成果,,其中理想汽車自研的整車操作系統(tǒng)“理想星環(huán)OS”入選北京重大開源系列成果
2025-03-27 13:45:32理想開源汽車操作系統(tǒng)理想高管:理想汽車不會在行駛中OTA 澄清誤解
2024-12-16 01:03:43理想高管