蘿卜快跑安全員多為網(wǎng)約車?yán)纤緳C(jī)(4)
“蘿卜快跑”高級測試開發(fā)工程師張星,。受訪者供圖
這幾年,,張星也見證著蘿卜快跑的更新迭代,,從最開始一味避讓,,到在安全基礎(chǔ)上更像人一樣開車,,更加強(qiáng)調(diào)道路的通行效率,,“我們自動駕駛有四個一直要不斷去努力的方向,,就是安全,、體感,、交規(guī)和智能性,。”
對張星來說,,任何一種可能出現(xiàn)的情況都需要認(rèn)真對待,,“沒有cornercase(罕見的場景)應(yīng)該是行業(yè)的共識,只要一種場景在路上出現(xiàn)過一次,,它就有可能出現(xiàn)一千次,、一萬次。在自動駕駛剛開始時,,大家會覺得一種場景出現(xiàn)的頻率非常低,,我們可以先不管它,其實我們在路上落地的時候,,你會發(fā)現(xiàn)隨著里程的增加,,沒有什么場景是不會重復(fù)出現(xiàn)的。”
張星曾見過這樣的案例,,在武漢高架匝道上,,有逆行電動車行駛到主路上,車主低頭看手機(jī),,“我們基于這個場景,,模擬電動車可能出現(xiàn)的位置,結(jié)果是可能在任何一個角落鉆出來,,基于此,,我們需要將任何可能出現(xiàn)的狀況都考慮到?!?/p>
更多罕見但并非不可能發(fā)生的情況也在發(fā)生著,,張星記得,一次模擬中,,一個人站在十字路口中間車輛左轉(zhuǎn)的線上,,阻擋主車行駛,張星和同事們在虛擬系統(tǒng)中將這個場景重現(xiàn),,并在所有大路口中設(shè)定行人隨機(jī)出現(xiàn),,測試主車是否能繞過行人。
蘿卜快跑在后排設(shè)有一個展示屏,,可以看到主車周圍的畫面,,能夠檢測出路上的車、人的朝向和行動軌跡,,在張星看來,這樣的配置能夠給乘客更強(qiáng)的信心和安全感,。
每一個新版本背后都是成千上萬次的測試,,“我們在仿真系統(tǒng)里已經(jīng)把武漢能跑的每一條車道,每一個轉(zhuǎn)向,,每一個信號燈都跑過一遍了,。”張星從未去過武漢,,但進(jìn)行過成千上萬次的模擬,,武漢的每一個高架,每一個停車場他都熟悉無比,。

西安和洛陽誰才是中國第一古都

特朗普:哈里斯若獲勝三戰(zhàn)板上釘釘——美大選風(fēng)云再起
我國科學(xué)家發(fā)現(xiàn)月壤生產(chǎn)水技術(shù) 月球科研站用水難題迎轉(zhuǎn)機(jī)

俄海軍“瓦良格”號編隊返航通過第一島鏈,,遠(yuǎn)航已滿7個月

“不死鳥”的后代:漫談美海軍列裝新超遠(yuǎn)程空空導(dǎo)彈

菲律賓,,要為美國兩肋插刀了

記者: 薩維奧正常參與曼城訓(xùn)練, 羅德里不在 新援狀態(tài)引關(guān)注

日印“2+2”對話硬扯中國,專家:兩國有權(quán)深化雙邊關(guān)系,但不應(yīng)針對第三方

聯(lián)合國稱加沙地帶僅剩下11%的區(qū)域供巴民眾生存

以色列代表埃爾丹再出暴論:應(yīng)把聯(lián)合國大樓從地球上抹去

乃萬回應(yīng)玩乙游 發(fā)長文懟黑粉造謠
烏軍進(jìn)攻庫爾斯克 讓俄軍加速進(jìn)攻頓涅茨克

庫里超神之戰(zhàn),全明星賽庫里16記三分球創(chuàng)造紀(jì)錄,,他就是三分之神

突然確診,!非常罕見的血癌,!馬刺21年老將宣布退役
我國科學(xué)家發(fā)現(xiàn)月壤生產(chǎn)水技術(shù) 月球科研站用水難題迎轉(zhuǎn)機(jī)

俄烏就談判問題激烈交鋒:俄外長稱目前不可能恢復(fù)對話,,烏總統(tǒng)稱正在實現(xiàn)戰(zhàn)略目標(biāo)

16年總決賽庫里被吹黑哨后怒扔牙套,,結(jié)果被球迷撿到賣出天價,!

新建三個集團(tuán)軍鞏固防線,,正逼近烏東部關(guān)鍵樞紐,俄整合更多部隊阻擊烏軍
中方駁斥美翻炒“中國核威脅論”:美國才是全球最大的核威脅、戰(zhàn)略風(fēng)險的制造者
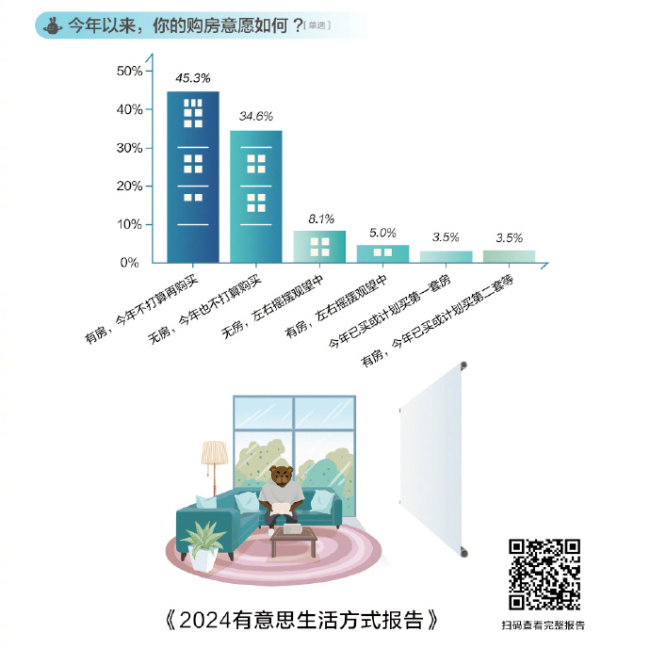
年輕人還考慮買房嗎,?

細(xì)思極恐!深扒《異形》6大奪命細(xì)節(jié),,弒母還不是最荒誕的結(jié)局,! 怪獸恐怖新巔峰

雷軍回應(yīng)王騰在公司玩黑神話:他說測試游戲本
特朗普:哈里斯若獲勝三戰(zhàn)板上釘釘——美大選風(fēng)云再起
西安和洛陽誰才是中國第一古都

白宮:拜登與內(nèi)塔尼亞胡通話,強(qiáng)調(diào)達(dá)成加沙?;鸷歪尫湃速|(zhì)協(xié)議“緊迫性”

機(jī)器鷹,、機(jī)器魚……軍用仿生機(jī)器人嶄露頭角

當(dāng)中年人成為實習(xí)律師

俄軍新建三個集團(tuán)軍,準(zhǔn)備怎么用,?

奧運(yùn)冠軍鄭思維偷偷回家為媽媽慶生 網(wǎng)友贊“貼心皮夾克”

布林肯結(jié)束中東之行,未能推動加沙?;饏f(xié)議達(dá)成

應(yīng)對庫爾斯克戰(zhàn)局,,俄國防部組建三大集團(tuán)軍

大將軍:恩比德跟約基奇處境類似,絕殺球會交給喬治或馬克西

張雨霏回憶帶病參賽將生死置之度外 14億人撐腰奪牌

81歲拜登沙灘午睡,,美國民眾憤怒,質(zhì)疑誰在掌舵國家,!

烏軍又發(fā)視頻稱摧毀俄軍在塞姆河修建的浮橋,,美媒:是個強(qiáng)烈信號
相關(guān)新聞
周鴻祎談蘿卜快跑:建議把無人駕駛車賣給網(wǎng)約車司機(jī)
近日,,蘿卜快跑引發(fā)廣泛關(guān)注,,周鴻祎今日發(fā)視頻談及蘿卜快跑搶網(wǎng)約車司機(jī)飯碗一事,并給出建議,。
2024-07-12 14:55:10周鴻祎建議把無人出租車賣給網(wǎng)約車司機(jī)蘿卜快跑被指搶網(wǎng)約車司機(jī)飯碗 自動駕駛影響引熱議
2024-07-10 20:57:38蘿卜快跑被指搶網(wǎng)約車司機(jī)飯碗蘿卜快跑"引發(fā)網(wǎng)約車司機(jī)焦慮:無人駕駛時代的職業(yè)困境
7月7日下午,,百度的“蘿卜快跑”無人駕駛出租車在綠燈啟動時,,與一名闖紅燈的行人發(fā)生輕微碰撞。現(xiàn)場迅速引來交警處理,,造成短時交通堵塞
2024-07-14 13:20:33“蘿卜快跑”引發(fā)網(wǎng)約車司機(jī)焦慮媒體評蘿卜快跑搶網(wǎng)約車司機(jī)飯碗 自動駕駛真搶飯碗,?
2024-07-12 06:24:39媒體評蘿卜快跑搶網(wǎng)約車司機(jī)飯碗蘿卜快跑邁向盈利:自動駕駛網(wǎng)約車新紀(jì)元
2024-07-11 14:35:00蘿卜快跑“瘋狂”的蘿卜快跑:網(wǎng)約車司機(jī)轉(zhuǎn)戰(zhàn)“幕后” 能賺著錢嗎?
2024-07-30 12:02:16“瘋狂”的蘿卜快跑:網(wǎng)約車司機(jī)轉(zhuǎn)戰(zhàn)“幕后”