拋棄OpenAI,Figure亮王牌:史上首次兩個機器人「共腦」(3)
Helix采用完全端到端的訓練方式,,將原始像素和文本命令映射到連續(xù)動作,,使用標準回歸損失。梯度通過用于條件化S1行為的潛在通信向量從S1反向傳播到S2,,實現兩個組件的聯合優(yōu)化,。Helix不需要任務特定的適配;它保持單一訓練階段和單一神經網絡權重集,,無需獨立的動作輸出頭或每個任務的微調階段,。
由于這種訓練設計,Helix可以在Figure機器人上進行高效的模型并行部署,,每個機器人都配備了雙低功耗嵌入式GPU,。推理流程在S2(高層潛規(guī)劃)和S1(低層控制)模型之間分割,,各自在專用GPU上運行。S2作為異步后臺進程運行,,處理最新的觀察數據和自然語言命令,,持續(xù)更新共享內存中的潛在向量。S1作為獨立的實時進程執(zhí)行,,維持平滑的整體上半身動作所需的關鍵200Hz控制循環(huán),。
Helix以200Hz的頻率協調35個自由度的動作空間,控制從單個手指運動到末端執(zhí)行器軌跡,、頭部注視和軀干姿態(tài)的所有動作。頭部和軀干控制帶來獨特挑戰(zhàn),,當它們移動時,,既會改變機器人的可達范圍,也會改變可視范圍,。機器人在調整軀干以獲得最佳可達范圍的同時,,用頭部平滑地跟蹤其手部動作,并保持精確的手指控制以進行抓取,。即使對于單個已知任務,,在如此高維的動作空間中實現這種精度一直被認為是極具挑戰(zhàn)性的。
Helix還在多智能體操作場景中展示了零樣本學習能力,,兩臺Figure機器人成功操作了在訓練中從未見過的雜貨,,展示了強大的通用泛化能力。兩個機器人使用完全相同的Helix模型權重運行,,無需針對特定機器人的訓練或明確的角色分配,。它們通過自然語言提示詞來實現協調配合,比如“把餅干袋遞給你右邊的機器人”或“從你左邊的機器人那里接過餅干袋并放入打開的抽屜中”,。
研究人員發(fā)現配備Helix的Figure機器人只需一個簡單的“拾取[X]”指令就能拾取幾乎任何小型家居物品,。即使在雜亂的環(huán)境下,機器人也能成功處理從玻璃器皿和玩具到工具和衣物等數千件前所未見的物品,,而這一切無需任何事先示范或定制編程,。Helix成功地連接了大規(guī)模語言理解能力與精確的機器人控制系統。這種通用的“語言到動作”抓取能力為類人機器人在復雜且不確定的非結構化環(huán)境中的部署開創(chuàng)了激動人心的可能性,。

你怎么看患者給醫(yī)生偷偷錄音 尊重與信任何在

今天北京北風強勁 明天開始天晴氣溫升 晝夜溫差加大請注意保暖

美國空襲也門胡塞武裝目的是什么 警告伊朗停止支持

匈總理要求歐盟不讓烏克蘭加入 歐爾班提出12點要求
《五哈》五指山海報,!節(jié)目組這波操作是要笑死人不償命?
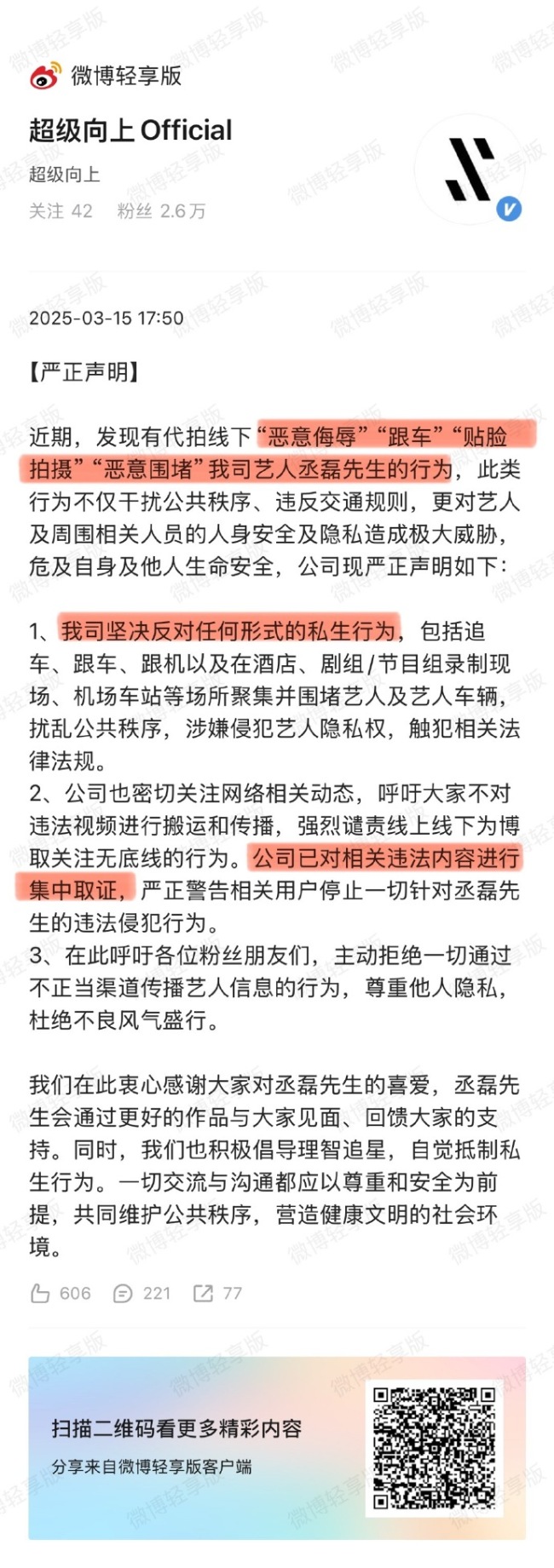
丞磊公司嚴正聲明,,網友:支持維權,!

劉曉慶對中年婚戀題材非常有把握 74歲挑戰(zhàn)忘年戀短劇

硬剛美國的加拿大是個什么樣的國家 能源武器與政治團結

國安部公開4名“臺獨”網軍身份信息!臺資通電軍“倚網謀獨”終是死路一條,!

41歲歌手宣布復出,,有廣東歌迷跨省捧場,!他的代表作很多人都聽過…… 《我的滑板鞋》再響舞臺

與大16歲女友同居31年 男子人財兩空 法律無情揭示真相
今天北京北風強勁 明天開始天晴氣溫升 晝夜溫差加大請注意保暖

“用了18枚導彈”!美國航母突然遭襲 胡塞武裝誓言報復

莫迪喊話烏克蘭和俄羅斯談才有用 直接對話是關鍵

3歲小女孩營養(yǎng)不良體重竟才16斤,,醫(yī)生:喂養(yǎng)不當 再加重會影響孩子各個功能

震撼航拍,!中國最長火車到底有多長
賣增重蝦仁公司負責人:被點名也沒辦法 違規(guī)添加保水劑引發(fā)關注

烏在庫爾斯克作戰(zhàn)行動結束意味著啥 戰(zhàn)場失利與外部施壓交織

歐豪說謝望和的故事就是自己的故事 角色共鳴深厚

英國邀20國派兵烏克蘭有何意味 歐洲戰(zhàn)略自主的嘗試

美方再次施壓烏克蘭割地 談判僵局難解
美國空襲也門胡塞武裝目的是什么 警告伊朗停止支持

春裝準備好了嗎 帽子添彩防曬兩不誤
你怎么看患者給醫(yī)生偷偷錄音 尊重與信任何在

全網首拆小米SU7 Ultra!金車標成財富密碼,?小米U7Ultra首遭魔性拆解

莫迪對華最新表態(tài):確保分歧不會演變成爭端,,進行“健康且自然”的競爭 強調對話解決問題

FBI等部門警告:美數百用戶已遭“美杜莎”勒索軟件攻擊!

資通電軍是干什么的 網絡攻擊與滲透真相

專家:烏克蘭正淪為犧牲品 大國博弈下的棋子

海底撈,,栽在兩個17歲男孩身上 公關失誤引發(fā)爭議

FBI等部門警告:美數百用戶已遭“美杜莎”勒索軟件攻擊,,威脅范圍正在擴大

每周跨40公里學模特門店要關門,,費用怎么退,?

學者解讀特朗普下令空襲胡塞武裝 意在向伊朗發(fā)出警告

匈總理要求歐盟不讓烏克蘭加入 向歐盟提出十二項要求

預測:菲律賓總統馬科斯的結局,誰將笑到最后,?
相關新聞
SB OpenAI Japan成立 軟銀與OpenAI深化合作
2025-02-05 00:50:43SBOpenAIJapan成立SB OpenAI 軟銀與OpenAI聯手打造AI新合資企業(yè)
2025-02-04 19:08:49SBOpenAI人民“拋棄”波司登?
2024-12-26 20:13:51人民拋棄波司登馬斯克加碼訴訟OpenAI 指控壟斷市場
2024-11-27 15:41:00馬斯克加碼訴訟OpenAIOpenAI被提起訴訟 版權爭議升級
11月29日,加拿大多家主流媒體因侵犯版權問題對開發(fā)ChatGPT的美國開放人工智能研究中心OpenAI聯合提起訴訟。此前,,美國《紐約時報》也以類似理由將OpenAI告上法庭
2024-12-01 13:39:00OpenAI被提起訴訟OpenAI希望與中國合作 愿盡最大努力
2025-02-12 09:26:53OpenAI希望與中國合作